2024年2月6日,美联航一架注册号为N47280的737-8 MAX飞机,从拿骚(巴哈马)飞往新泽西州纽瓦克(美国)执行UA-1539航班,载有155名乘客和6名机组人员,在着陆过程中,方向舵踏板卡在空档位置,降落在纽瓦克的04R跑道上。机长通过方向盘保持方向控制,在没有发生进一步事故的情况下着陆,并将飞机滑行至停机坪。第二天,这架飞机进行了试飞,在此期间,异常情况得到了再现。
2024年3月7日,美国国家运输安全委员会报告称:
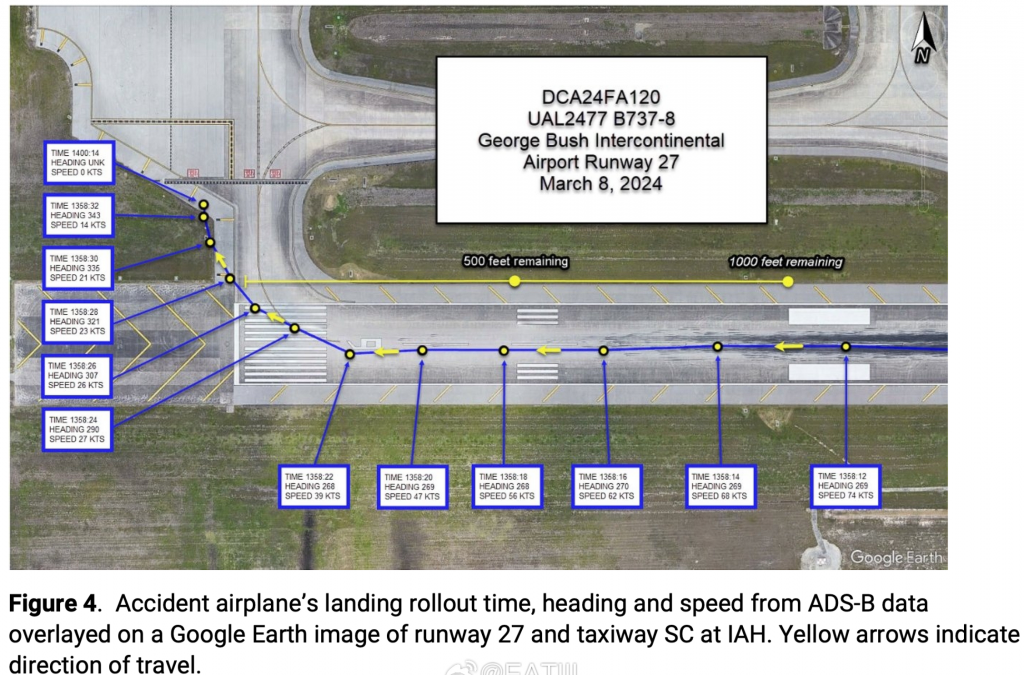
在事故后的一份声明中,机长报告称,在着陆过程中,在试图保持跑道中心线时,方向舵踏板没有响应“正常”施加的脚压力而移动。踏板仍“卡”在空档位置。机长使用前轮舵柄将飞机保持在跑道中心线附近,同时减速至安全滑行速度,然后离开跑道进入高速岔道。在高速岔道时,机长要求副驾驶检查方向舵踏板,他报告了同样的问题。船长报告说,不久之后,方向舵踏板开始正常工作。停机后,机组人员通知UAL维护飞行排故。这架飞机因维修和故障排除而停止使用。
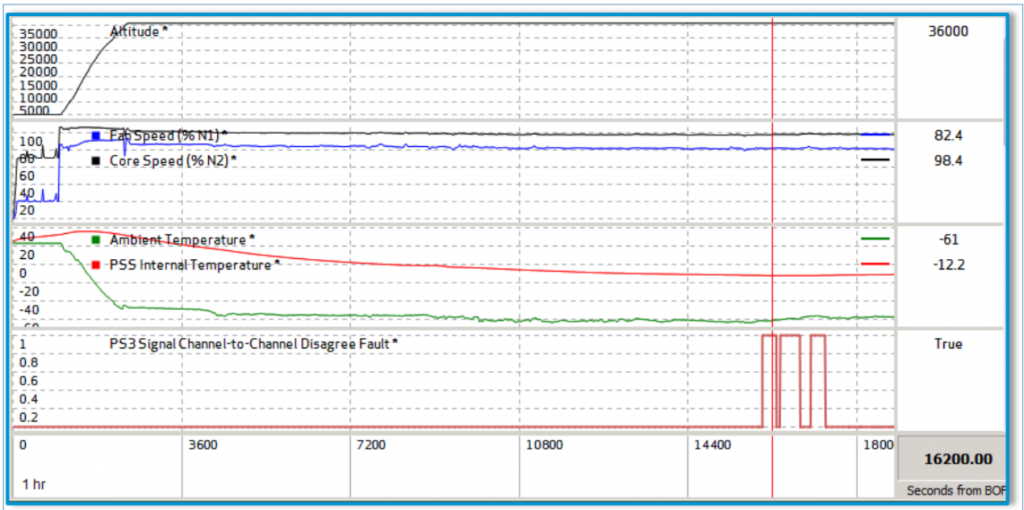
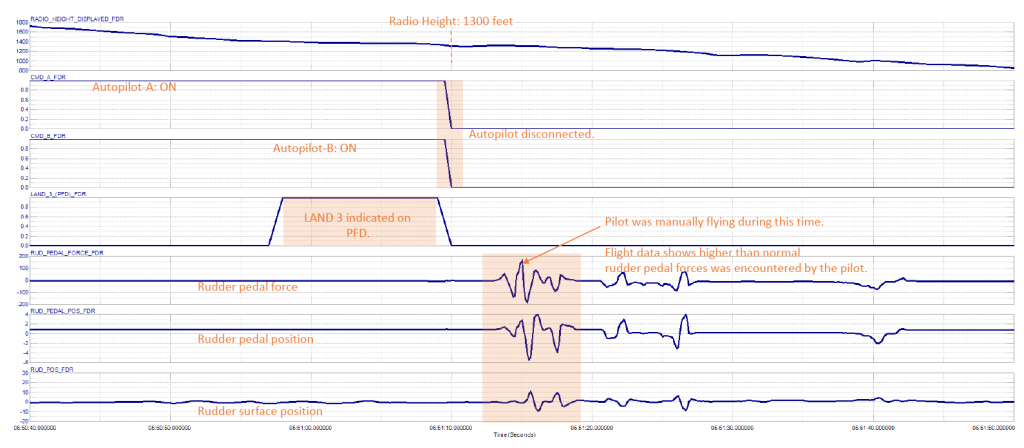
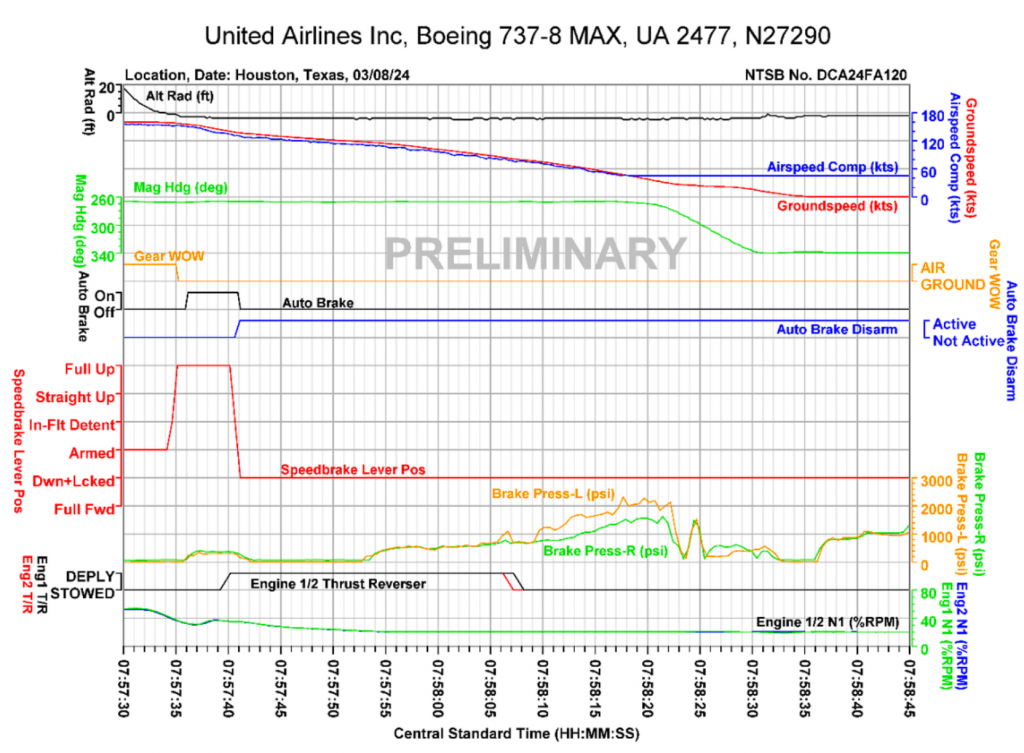
对初步飞行数据记录器(FDR)数据的审查证实了飞行员关于方向舵系统故障的说法。数据显示,在着陆和随后的推出过程中,舵面位置保持在其中性位置附近,尽管观察到方向舵踏板的力输入正在增加。着陆后约30秒,观察到显著的踏板力输入以及相应的舵面运动。之后,方向舵踏板和舵面开始按命令移动,并在滑行的剩余时间内继续正常工作。
2024年2月9日,UAL在EWR对事件飞机进行了试飞,并能够复制事件中发现的舵系统故障报告。结果,试飞剖面图被中止,飞机返回EWR并顺利降落。
飞行测试后,美国国家运输安全委员会收到了飞行控制问题的通知,并开始了事故调查。
美国国家运输安全委员会进一步报告:
事故后对方向舵控制系统的故障排除和检查,没有发现系统或其任何部件出现明显故障,这些故障会导致1539航班和试飞期间观察到的移动受限。作为预防措施,NTSB系统小组拆除了后舵输入扭矩管和相关的上下轴承以及舵滚动引导伺服系统,以进行进一步检查。
2024年2月28日,系统小组在爱荷华州锡达拉皮兹的柯林斯航空航天设施举行会议,检查和测试从事故飞机上拆除的SVO-730推出制导伺服系统。进行测试是为了评估伺服的温度“低温适应性”,可能对移动伺服输出曲柄臂所需的扭矩的影响。在室温下测试发现,旋转伺服输出曲柄臂的扭矩在设计规范范围内。然后将该装置“冷浸”1小时,并重复测试。该测试发现,移动伺服输出曲柄臂的扭矩明显超过了规定的设计极限。由于伺服输出曲柄臂与方向舵输入扭矩管机械连接,因此伺服输出曲柄的受限运动将阻止方向舵踏板在飞行1539和试飞期间移动。随着调查的继续,将对SVO-730推出制导伺服系统进行进一步检查。
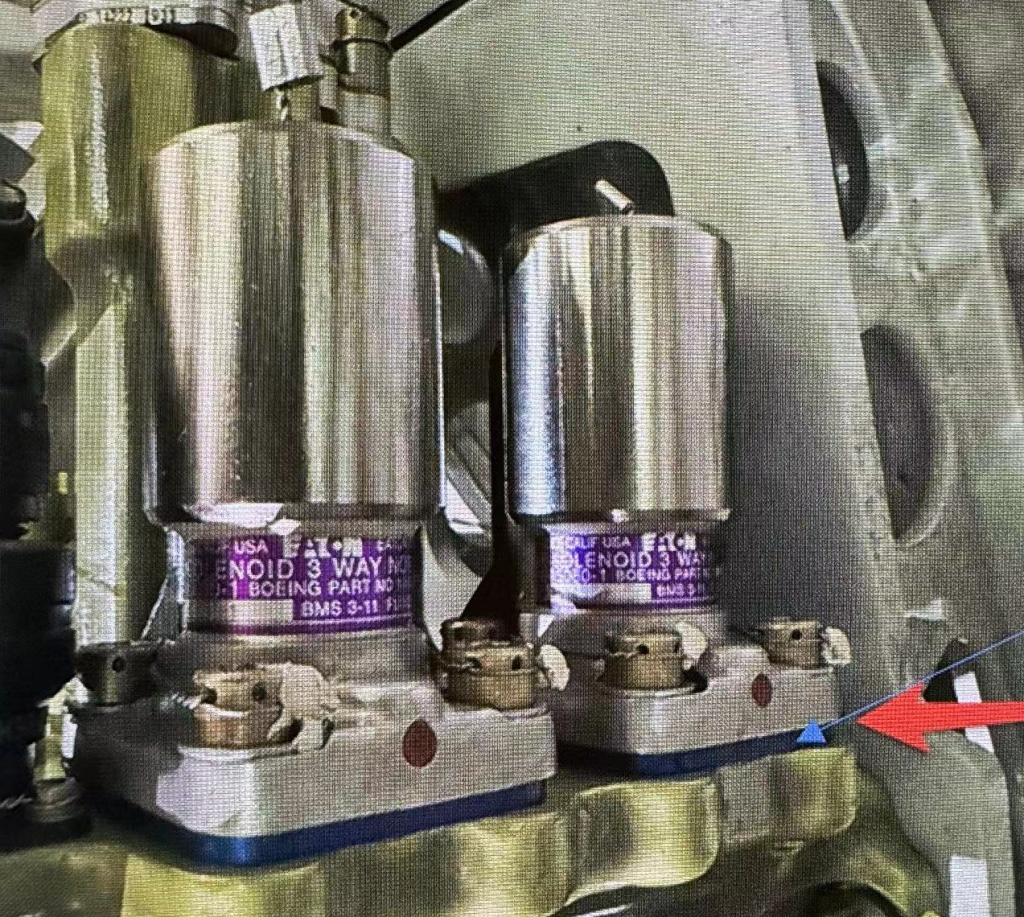
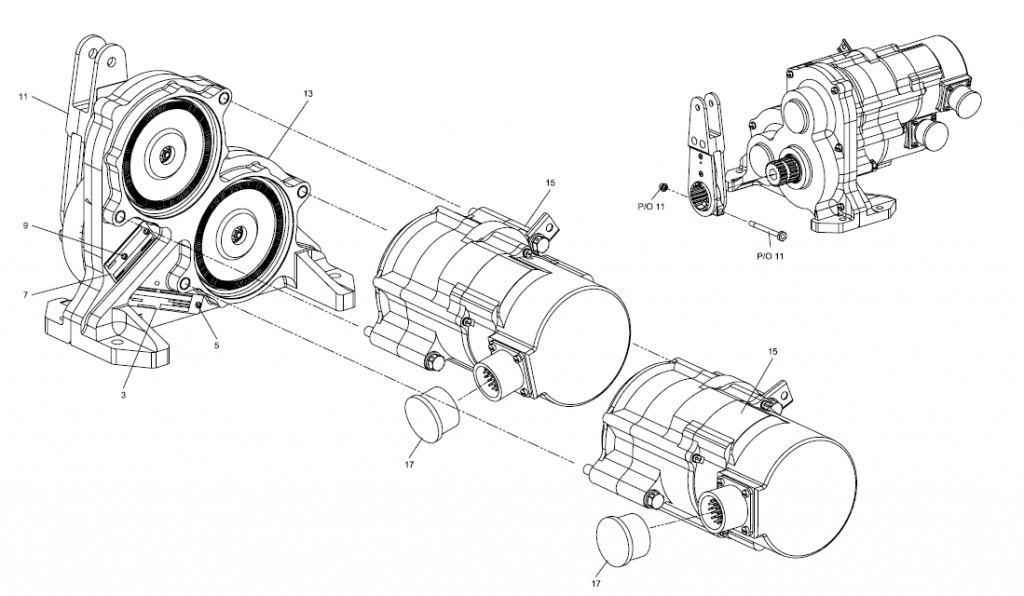
点评说明:P/N 822-1588-101 Servo Drive Unit (SVO-730) 。
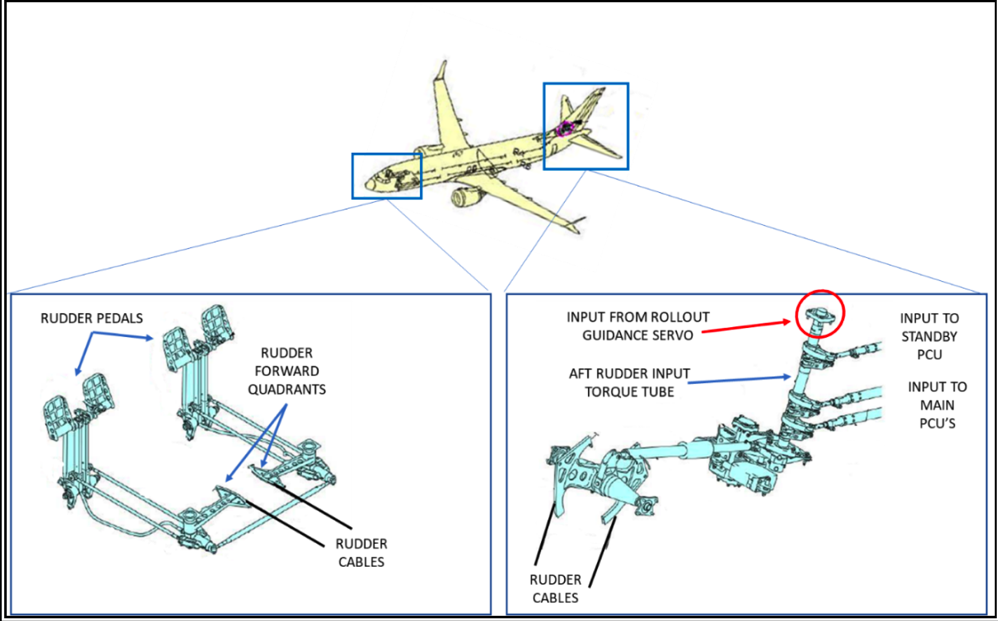
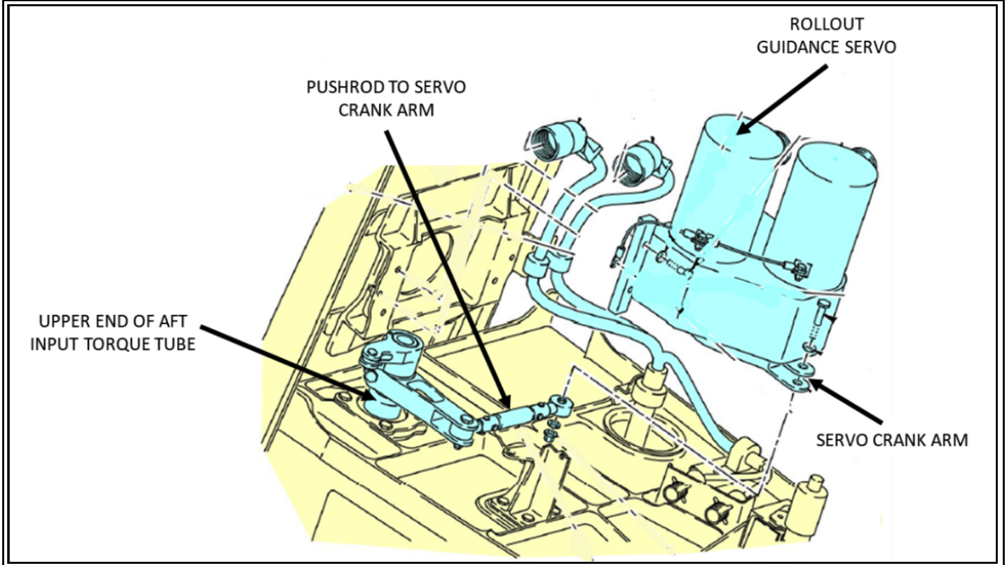
737飞机方向舵的操纵是通过一个闭环系统,从驾驶舱内飞行员的方向舵脚蹬通过单线控系统、方向舵扇形盘、脚蹬力传感器传输到垂直尾翼上的后方向舵输入扭矩管。扭矩管的旋转为两个主方向舵和备用方向舵动力控制组件(PCU)提供指令输入,以移动舵面。美联航于 2023 年 2 月 20 日从波音公司接受到该事件飞机,该机配置有一个方向舵(型号为SVO-730)滑跑引导伺服器,但根据 UAL 的交付要求,该伺服器已被禁用,以便将自动飞行系统从 CATIII B重新构型为 CATIIIA 的能力。虽然该伺服器被禁用,但它仍通过伺服器的输出曲柄臂和推杆与方向舵输入扭矩管的上部机械连接(见下图)。
737MAX8飞机是可以满足三类B盲降运行的,如果不需要三类B盲降,只需要三类A,方向舵上那个滑跑引导伺服器就不需要工作。B盲降指的就是这个ROLL OUT功能,落地后能提供自动滑行功能。
但是这架飞机出厂是安装了滑跑引导伺服器,航空公司选择禁用该装置,应该是没有和自动驾驶系统铰链,也就是和之前那个737MAX9的中门一样,航空公司可以选择不启用,或者禁用这个装置。
但是这个装置却和控制方向舵的扭矩杆机械相连,在它发生“冷浸”故障时,会卡阻,进而导致方向舵被卡阻。
当温度较高时,这个伺服器不卡阻了,方向舵就又恢复正常了。
3月13日更新
波音发布MOM-MOM-24-0142-01B介绍此案例,
Rudder Rollout Guidance Actuator (RGA)的原理背景说明。SDS 22-11-00-146
RGA是自动驾驶仪增强型数字飞行控制系统(EDFCS)中IIIb类(CAT IIIb)自动着陆能力的一部分。如果安装了自动驾驶EDFCS客户化选型,则包括对飞行控制计算机(FCC)、双通道方向舵滚动引导作动器(RGA)和方向舵输入扭矩管双位置同步器的额外飞机线路、硬件和软件更改。
在CAT IIIb进近过程中,RGA使用FCC命令定位方向舵以进行偏航控制。它还提供输入,以在着陆的滑跑阶段控制飞机在跑道上的路径。RGA装置确实提供了方向舵“卡涩”超控保护。当高度小于2FT,该功能启动,当地速降至40节,这个功能退出。
在推出过程中,FCC计算偏航命令,以在着陆后遵循跑道中心线。偏航指令传递到方向舵伺服,以移动方向舵并反向驱动方向舵踏板。这允许偏航指令驱动前轮转向。当档位高度小于2英尺时,将启用卷展栏模式。当地面速度降至40节时,自动驾驶仪将在推出过程中脱离。
FCC使用这些输入来计算RGA的工作指令:
-定位器偏差
-舵面位置
-偏航率
-跨跑道加速度
-无线电高度。
根据美国国家运输安全委员会的初步报告,RGA被送往爱荷华州锡达拉皮兹的柯林斯航空航天公司进行调查和根本原因鉴定。初步调查表明,在-55华氏度的低温浸泡后,移动伺服输出曲柄臂的扭矩明显超过了规定的设计极限。到目前为止,尚未确定根本原因,调查仍在进行中。方向舵输入扭矩管和相关轴承也将接受NTSB系统组的检查。
RGA是自动驾驶仪增强型数字飞行控制系统(EDFCS)中IIIb类(CAT IIIb)自动着陆能力的一部分。如果安装了自动驾驶仪EDFCS客户变量选项,则包括对飞行控制计算机(FCC)、双通道方向舵滚动引导执行器(RGA)和方向舵输入扭矩管双位置同步器的额外飞机接线、硬件和软件更改。
在CAT IIIb进近过程中,RGA使用FCC命令定位方向舵以进行偏航控制。它还提供输入,以在着陆的推出阶段控制飞机在跑道上的路径。RGA装置确实提供了方向舵“卡涩”超控保护。
2019年,波音公司收到了两份关于737NG飞机类似行为的单独报告。更换RGA后,这两个问题都得到了解决。
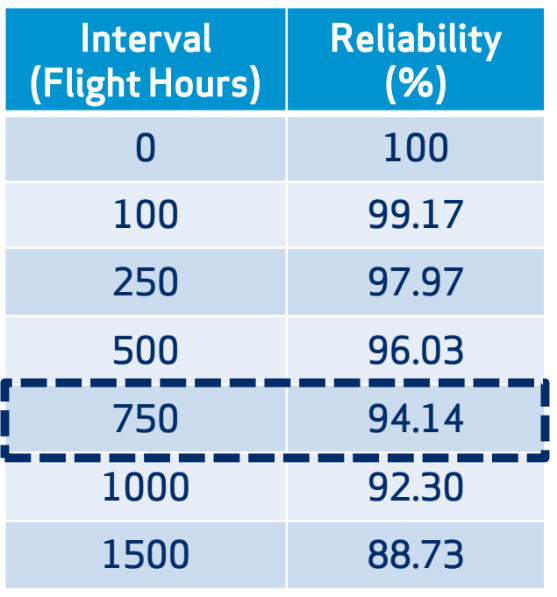
在使用中,RGA远远超过其规定的平均无故障拆卸时间/平均无故障运行时间(MTBR/MTBF)要求。机队平均MTBR为585475 FH。
波音公司正在通过持续运行安全计划(COSP)审查这一问题,如果需要采取任何进一步行动,将通知运营商。
从IPC适用性和SAP数据看,装了该部件的飞机包括1562/1559/1793/1902/1906/1903/1905/224J/224F/224G,这些飞机。目前都没有批三类运行的。
2024年9月更新
背景:美国东部标准时间2024年2月6日15:55左右,美国联合航空公司(UAL)的1539号航班(波音737MAX8,注册号为N47280)在新泽西州纽瓦克国际机场(三字码:EWR)着陆滑跑过程中遭遇方向舵脚蹬 “卡阻 “。机长使用前轮转弯手柄使飞机保持在跑道中心线附近,同时减速至安全的滑行速度,然后脱离跑道进入快速脱离道。此后不久,方向舵脚蹬又开始正常工作了,过程中没有造成其他安全后果。后续飞机停场进行维护和排故。根据调查,这架飞机选装了滑跑引导伺服器,这个装置和控制方向舵的扭矩杆机械相连,在它发生“冷浸”故障时,会卡阻,进而导致方向舵被卡阻。
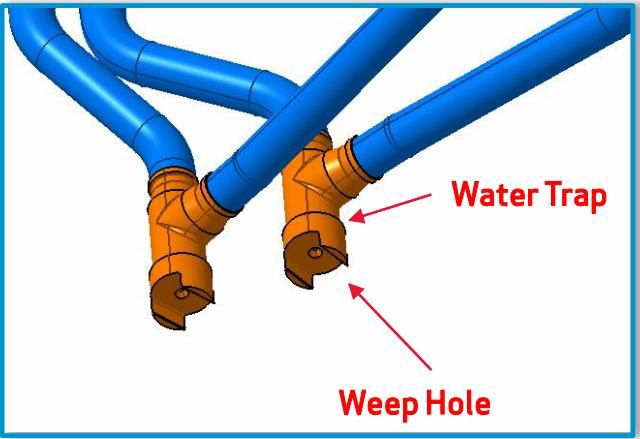
调查情况:在8月23日,波音发布联合调查情况的通报,调查发现为滑跑引导伺服器(Rollout Guidance Servo)故障,该部件离合器总成中的轴承在组装时密封件朝向离合器齿。而装配图规定,安装轴承时应背对离合器齿。不正确的轴承安装使RRGA组件更容易受潮,即轴承的密封件可能会由于输出轴的额外摩擦而移出其通道。这种安装情况自2017年2月以来一直存在,导致353架飞机在这种条件下交付给波音公司。
航司情况:我司绝大部分飞机不受影响,目前机队安装有这一部件的NG有7架(B-1559,B-1562,B-1793,B-1902,B-1903,B-1905,B-1906),MAX有3架(B-224F,B-224G,B-224J)。根据波音发布的序号信息,MAX的3架飞机受影响。224J序号:4GPL6K、224F序号4GPH9V、224G序号110422。当前机队FCC OPS件号为2274-COL-AC2-26,全机队一致。
FAA和波音都发布了针对性的操作建议。
波音的验证方法是:
由于在大部分飞行剖面中通常不需要使用方向舵,因此在进场和着陆阶段之前,机组人员可能不会明显看到是否存在冻结的RRGA和相关的卡住或受限的方向舵。侧风条件需要侧滑(机翼低)以进行跑道对齐,或者发动机故障需要使用方向舵,这些情况将立即确定。在双舵驾驶过程中,也可能发现方向舵卡住或受限配备需要安装RRGA的故障操作自动着陆系统的飞机上的自动驾驶仪进场。如果ILS进场可用,波音公司建议机组人员启用第二个自动驾驶仪,允许方向舵完成伺服测试。自动飞行系统在捕获LOC或G/S后,以及在1500英尺无线电高度以下时,对自动驾驶舵伺服进行测试,以验证伺服功能。当一个小施加方向舵的运动。如果方向舵被卡住或限制,伺服测试将失败,自动驾驶仪将在大约1200英尺的无线电高度脱离。
如果机组人员在飞行过程中遇到方向舵堵塞或受限,波音公司建议执行堵塞或受限飞行控制非正常检查表(NNC)。如果在着陆前遇到方向舵受阻或受限的情况,机组人员应完成复飞和复飞程序,爬升到安全高度,并完成受阻或受限飞行控制NNC。受阻或受限飞行控制NNC只能在安全高度的空中执行。如果在着陆和继续展开后遇到飞行控制受限的情况,波音公司建议应用差动制动来保持跑道中心线。除非飞机控制需要,否则避免在100 KIAS以上使用前轮转向,因为存在过度控制的可能性。
机组在实际验证中的情况是:馈截获ILS后接通自动驾驶双通道,在大约1200尺显示NO LAND 3信息,但自动驾驶没有断开。
后续计划:
1,向COLLINS要件,更换受影响序号的部件;
2,向波音购买SB,拆除此部件。
2024年11月5日更新
1,针对RRGA如果直接拆除的后果,波音表示会导致以下后果:
1)、双通道AUTOLAND会不可用。
2)、NO AUTOLAND会出现在PFD和ENGINE页面。
3)、落地后的转向等等均需要机组来操作。
2、波音提供客户化改装方案,主要设计FCC识别销钉的去处、传感器和作动器的拆卸。SB报价约32万美金。
2024.11.11 局方发布明电,建议拆除RGA。
波音发布了拆除失效状态RRGA的SB。
SB737-22-1468 MAX
SB737-22-1469 NG
2025年3月,补充自有案例
22*J飞机,在长春两次反映,双通道自动驾驶五边进近1300英尺时自动驾驶自动断开。长春过站完成DFCS自检测试,A/B通道当前测试均正常,历史LEG01段均有MSG 22-11621 RUD MOTION TEST信息。
在和波音沟通后,波音表示:通过对信息及相关飞行数据的审查表明,您的事件与多运营商信息MOM-MON-24-0142和MON-MON-24-0442中描述的RRGA状况有关。飞行数据表明,在自动驾驶仪断开后,进近阶段出现了高舵脚踏力的证据,同时在初始着陆滑跑阶段也出现了一些高舵脚踏力的证据。地面人员发现的22-11621维护信息也表明RRGA在飞行中无法移动方向舵,并且可能表明此次飞行中存在方向舵限制。
根据我们的审查,建议采取以下措施:
1、请从飞机上下载FCC自动驾驶仪故障历史数据文件,并将这些数据文件提供给波音公司: a. 参考AMM 46-13-02(LRU报告)以获取批准的程序。 b. 确保选择自动驾驶仪故障历史。 c. 使用维护笔记本电脑下载通道A和通道B的自动驾驶仪故障历史数据文件(应有两个自动驾驶仪文件,一个用于FCC-A,一个用于FCC-B)。
2、将RRGA从飞机上拆下,并将其送往科林斯航空航天维修设施进行评估。
3、请告知波音公司拆下的RRGA的件号和序列号。
4、请告知波音公司安装的RRGA是否之前根据科林斯组件服务公告SVO-730-SB-A或SVO-730-SB-B进行了改装。 a. 注意:我们的记录显示,根据科林斯组件服务公告SVO-730-SB-A和SVO-730-SB-B评估RRGA的建议已于2024年10月通过之前的BSC消息HNA-HNA-24-2252提供给海航。我们不确定是否执行了此操作。
5、请与执行此次飞行的机组人员协调,并获取该事件的飞行员报告,记录飞行员的观察和飞行员在发生时采取的行动,并将这些信息提供给波音公司。
更换RRGA