737-SL-52-054
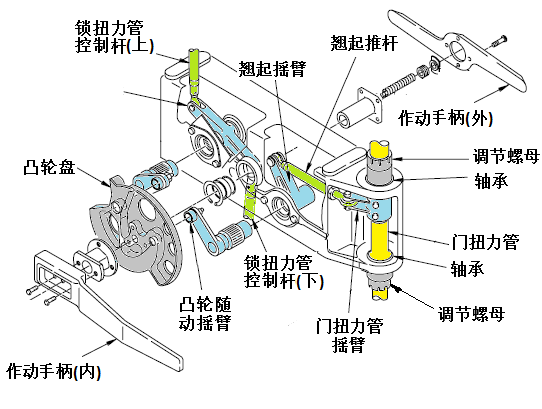
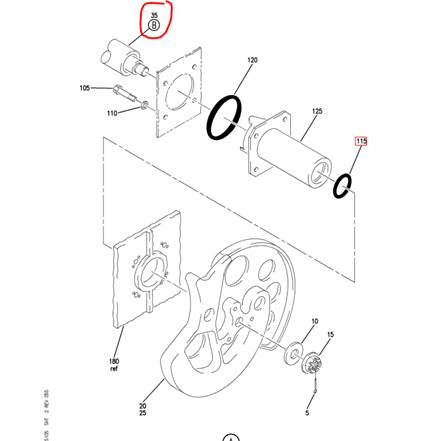
自有案例,机队中偶有反映,波音在2011年发布的737-SL-52-054中有说明,若手柄盒中的封圈(ITEM 115)未正确安装到位,当飞机起飞后,客舱内外压差气流将手柄(ITEM 35)推出, 受到外部气流的影响,导致手柄转动90度,无法入槽。
从机队案例来看,地面检查手柄复位正常,弹簧力正常,且后续运行中也未再出现外部手柄脱出的情况。结合厂家信息,分析可能性有二:
1、是由于在舱门开关过程中,出现了偶发的封圈密封不好,气流推出导致外部手柄脱出,完成重新开关舱门后恢复正常。
2、如果单单靠外部手柄弹簧力自动回弹,一定程度上不一定能完全啮合,需要往内推,使其到位。这是日常门开关过程中比较容易忽略的,典型的日常开门后未完全推入槽内的图片如下所示。

安全分析: 从波音分析来看,外部手柄脱出对飞行安全无影响。因为手柄不会移动到衔接锁机构的位置,不会导致舱门解锁和打开

就此向波音进一步询问更多可能性。波音结合其他运营商的报告,认为可能的原因有:
1.手柄机构中缺少O形环(M83461/1-212 O形环)。从把手盘上的孔向内看,看看O形圈是否在凹槽中(从门的内侧看不到,因为有轴承挡住了去路)。如果O形环在凹槽中并且没有损坏,那么下一步将是拆解手柄轴并检查弹簧是否损坏或无力。注意:如果O形环没有正确地放入凹槽中,那么在拆卸轴时,它很可能会脱落。
b.气缸端盖的固定弹簧销缺失。弹簧销P/N为MS39086-111。详见149A6109组件。
c.内部弹簧故障(弹簧断裂或薄弱)。这种情况很少见。由于弹簧用于压缩,如果弹簧断裂,剩余的弹簧仍会将手柄推向收起位置。然而,由于弹簧压缩力的损失,手柄会变得松动。手柄可以手动收起,但不想停留在那里,就像弹簧是一体的。外部把手凹槽弹簧的P/N为63-2848。
d.机组在飞行前没有正确收起手柄。手柄并非设计为可自行收起。弹簧设计用于将其保持在收起位置。
因为弹簧或销钉缺失,是稳定的故障表现,如果检查弹力正常,且后面故障不再现,最大的可能性就是封圈在转动过程中间歇性不能完全密闭。但在后续的作动中得到了恢复。
Boeing has received reports from other operators experienced the same condition, which led to the issuance of Ref /B/ Service Letters to address this condition. Possible causes are:
a. O-ring missing in handle mechanism (M83461/1-212 O-ring). Look inside through the hole in the handle pan to see if the O-ring is in the groove (you can’t see it from the inside of the door because there is a bearing in the way). If the O-ring is in the groove and not damaged, then the next step would be to disassemble the handle shaft and check the spring for damage or weakness. Note: If the O-ring wasn’t properly in the groove, it will most likely fall out when the shaft is removed.
b. A retaining spring pin for the cylinder end cap missing. The spring pin P/N is MS39086-111. See 149A6109 assy for details.
c. Internal spring failure (broken or weak spring). This condition is rare. Since spring is used in compression, if the spring was to have broken, the remaining spring would still push the handle towards the stowed position. However, the handle would get loose because of the lost spring compression. The handle would be able to be manually stowed, but would not want to stay there, like a spring is in one piece. P/N for Exterior Handle Recess Spring is 63-2848.
d. Operator did not stow the handle properly before flight. The handle is not designed to be self-stowing. The spring is designed to keep it in the stowed position.
2023年6月补充案例
有飞机连续发生不在槽内的情况,几乎每段都出现。安排拆开,检查发现封圈缺失,存在漏装的情况。