2025年6月,有飞机反映APU和地面电源切换时,驾驶舱两个扬声器会有MCP面板高度窗警告。经验证实切换电源时,MCP目标高度窗口的示数就会跳到50000,重新设置目标高度后恢复正常,再次切换电源现象依旧。串件隔离MCP面板、FCC故障依旧。MCP面板原件恢复,后续验证飞机断电,闭合RA1跳开关(前期因RA1接收天线翘起办理LSDD,并执行M项),给飞机上电,转换电源现象消失。
该现象并未在每个飞机上引起,并没有特定的规律。以做记录。
2025年6月,有飞机反映APU和地面电源切换时,驾驶舱两个扬声器会有MCP面板高度窗警告。经验证实切换电源时,MCP目标高度窗口的示数就会跳到50000,重新设置目标高度后恢复正常,再次切换电源现象依旧。串件隔离MCP面板、FCC故障依旧。MCP面板原件恢复,后续验证飞机断电,闭合RA1跳开关(前期因RA1接收天线翘起办理LSDD,并执行M项),给飞机上电,转换电源现象消失。
该现象并未在每个飞机上引起,并没有特定的规律。以做记录。
外部航司经验
针对无线电高度跳变故障,导致起落架构型警告、FCC接收不到有效RA数据导致自动驾驶无法衔接、飞行指引消失、近地警告计算机少报高度四大类故障,几乎全部都发生在Collins LRA-900构型飞机上。
此前认为的可能性原因:
1、参考737NG-FTD-34-03001:波音在实验室中模拟出了LRA-900在收发天线20英寸标准安装间距的情况下,LRA-900型收发机在特定的条件下会有高于500英尺跳变的故障;间距大于24英寸的情况下,则未复现。Collins发布VSB LRA-900-34-5对收发机硬件改装,波音据此关闭了该FTD。从完成改装的航司看,但情况无改善;
2、737NG-FTD-34-15002和737-SL-34-260:波音怀疑飞行指引消失故障与同轴线缆卡子相关,要求更换LRRA收发机同轴线缆卡子(P/N:BACC10NA102),从执行情况看,但装机Collins RA收发机飞机FCC丢失无线电高度数据导致的飞行指引消失故障并未有改善。
3、导致高度表出现跳变可能是天线问题,从驻波比普查并未发现问题。
针对可能性3,有航司案例显示,在对一架反复出现跳变的飞机上,使用TDR和FDR对同轴线缆检查,也未发现问题。
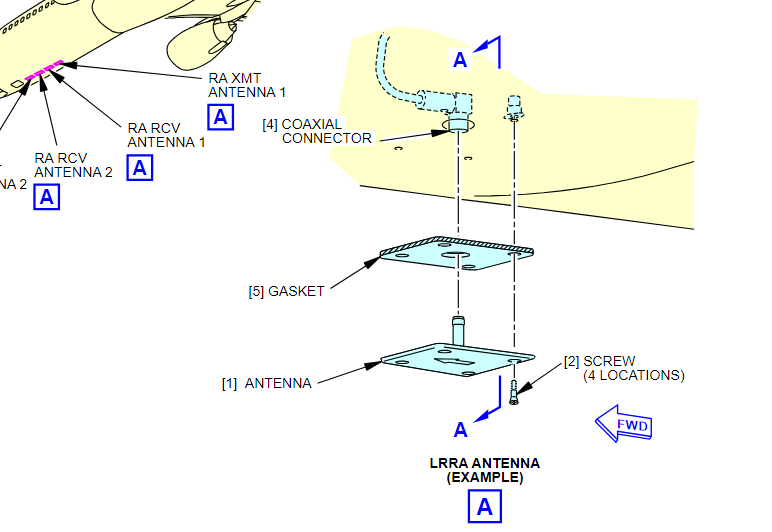
四个RA天线都使用gasket构型。检查中发现RA1的接收和发射天线安装在机体上的螺钉孔附近,有gasket残留胶体,彻底清除机体上的胶后,故障未再出现。分析认为RA天线通过壳体和机身接地,为同轴线缆起屏蔽作用,安装螺钉附近存在胶体导致接地不稳定,间隙性出现RA系统故障。

机队的GASKET构型,是737-SL-34-210介绍引进SB 737-34-2395
目的是通过使用聚氨酯导电凝胶垫圈、自流平聚氨酯密封胶和BMS 5-37 A级连接器密封胶来改进LRRA天线的安装。还会使用BMS 5-95防风雨/气动密封胶(航空密封胶)。从4307号生产线位置开始的飞机将采用新的安装程序交付。预计这些更改将提供更好的防腐蚀保护,以及对天线和相关同轴电缆连接的更好保护。
带GASKET构型的如下。
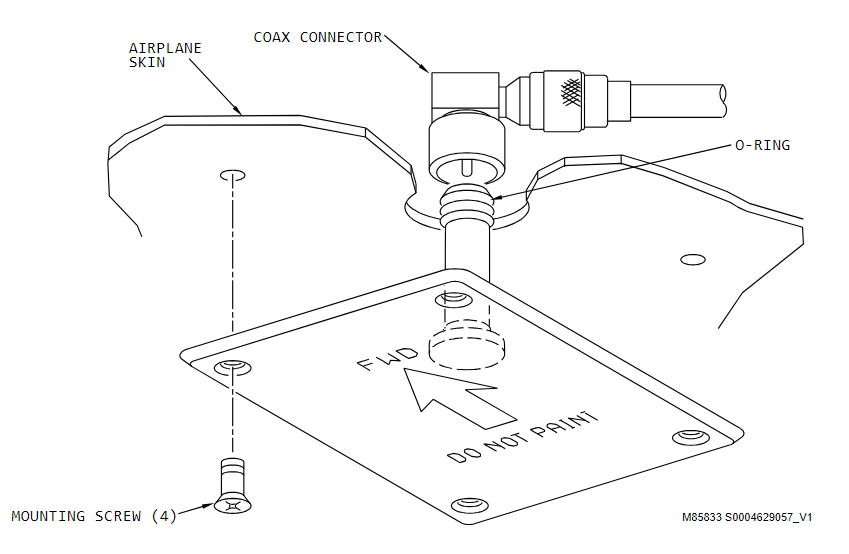
没有GASKET的构型如下。
点评:从接地角度思考是可能性原因之一。
2025年2月,有54*7飞机反应起飞滑跑,按压TO/GA电门,FMA无TO/GA显示,无飞行指引仪,离地后触发风切变警告,在风切变机动中,按压TO/GA电门,指引恢复。起飞滑跑按压TO/GA电门,FMA TO/GA方式无法接通,起飞离地起落架收上之后触发风切变警告。
EEC 1当前和历史LEG0有73-31711 ADIRU1 TAT DATA AND ADIRU2 TAT DATA DISAGREE。
EEC2当前和历史LEG0、2、3有73-31712 ADIRU1 TAT DATA AND ADIRU2 TAT DATA DISAGREE信息。
DFCS历史A通道Leg01有22-11210 FGN FAILS TO ENT TOGA(怀疑部件FCC B)、22-11733 TAS INV,B通道历史leg01有22-11209 FGN FAILS TO ENT TOGA(怀疑部件FCC A)。
次段故障依旧
EEEC 1当前和历史LEG0、LEG1 有73-31711 ADIRU1 TAT DATA AND ADIRU2 TAT DATA DISAGREE。
EEC2当前和历史LEG0、1、3、4有73-31712 ADIRU1 TAT DATA AND ADIRU2 TAT DATA DISAGREE信息。
DFCS自检当前正常,DFCS历史A通道Leg01有22-11210 FGN FAILS TO ENT TOGA(怀疑部件FCC B)、22-11733 TAS INV,B通道历史leg01有22-11209 FGN FAILS TO ENT TOGA(怀疑部件FCC A)。
ADIRS-L当前正常,历史leg1、2、5有34-21022 TAT PROBE SIGNAL FAIL信息,ADIRS-R当前历史无故障信息。
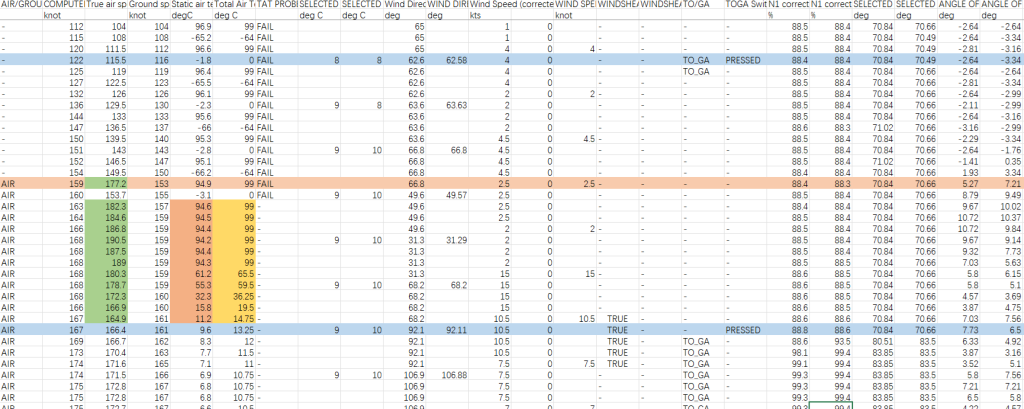
整体看集中在TAT上面。
回溯历史有短时信息,73-31711 ADIRU1 TAT DATA AND ADIRU2 TAT DATA DISAGREE,在慢车阶段有TAT fail的数据记录。 由于没有发生在起飞阶段,因此没有触发风切变的发生。
从历史经验看,TAT温度属于大气数据的一部分,通过ADIRU提供信号给DEU、EEC、FMC、FCC等用于发动机控制、推力限制值计算、自动驾驶、自动油门和飞行指引系统等。如果TAT 1和TAT 2都丢失了,受到影响的系统可能出现以下一个或多个指示:
并没有出现过发生风切变的案例,而73-31711这类信息出现较多。
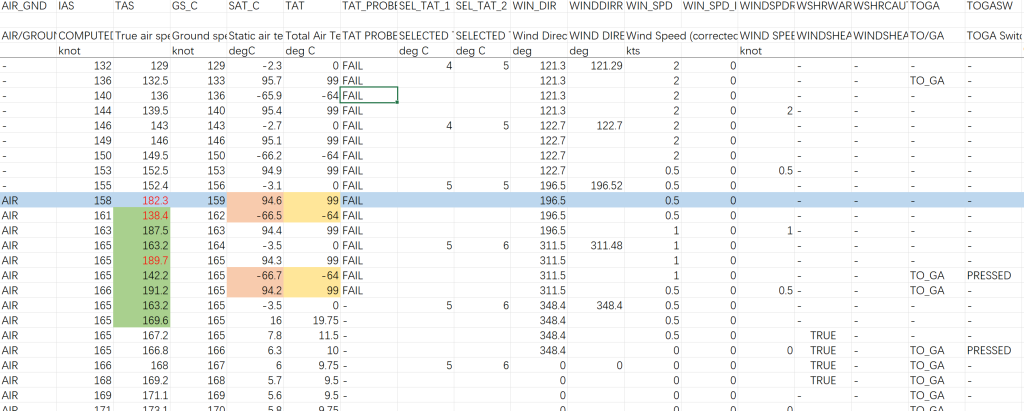
从风切变的触发条件看,飞机速度大于80节且低于1500英尺无线电高度时,前置风切变警告会被激活。从TAS与IAS的数据对比可以看出,TAS出现了大幅的跳动,与TAT温度的跳变一致。
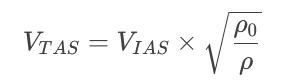
TAS(True Airspeed,真空速)和IAS(Indicated Airspeed,指示空速)的原理决定了两者的不同,
两者的计算关系如下,其中ρ0 是海平面标准空气密度,ρ 是当前高度的空气密度。空气密度(ρρ)随高度和温度变化,因此TAS需要修正这些因素。
而TAT温度,是空气因压缩和摩擦加热后的温度,通常高于静温(SAT,Static Air Temperature)。两者关系如下。

温度升高会导致空气密度降低,从而增加TAS。因而近似的可以得出以下的公示。

因此TAT温度的跳变直接影响了SAT的温度,SAT的温度影响了当前空气密度的计算,温度突然升高,使密度突然减小,TAS速度就出现了相对IAS速度突然的变化。被误判为风切变。
来源于网络公众号
一、雷达
1、一次雷达
空中飞行飞机的准确位置是空管机构需要掌握的最重要的信息。早期的一次雷达【PSR-Primary Surveillance Radars】工作原理是发射信号,遇到空中能反射雷达信号的飞行物/目标【主要指飞机】,一次雷达接收到反射的信号后就能确定该目标的方位和位置,但不能探测/确定目标的高度。
一次雷达不需要所探测的目标有任何回应,只要所探测的目标能反射雷达波就行,通常都部署在特定的具有战略意义,能覆盖最大区域的位置,除了部署位置以外,衡量一次雷达覆盖范围的另外一个标志性参数是雷达的发射功率,功率越大,覆盖的区域就越广。

使用一次雷达监视空中目标就好比地面交通警察监视和指挥一群聋哑人类似,交通警能看到周围的人,但却不能和他们沟通,只能监视动向。
2、二次雷达
二次雷达【SSR-Secondary Surveillance Radar 】的问世在解决这个难题的方向前进了一步,但需要监视目标的回应和配合,被监视的目标必须回应监视者【空管管制员或其他相关方】的询问,要求被监视目标最起码应该能回应监视方目标身份识别和高度等信息。
地面上二次雷达和飞机装备的应答机使用基本上解决了监视方问询和目标回应的双向交流问题,即监视方起码能掌握目标的身份,方位和高度等基本信息。应答机的使用和不断升级,特别是具备S-模式应答机的应用,使监视方基本上能获得目标的身份识别,高度,航向,航速和航迹等必需的信息。
空管二次雷达使用的7700代码是飞机应答机设置的一个特殊代码,用于向空中交通管制表明航空器正处于(紧急状态)。这是国际民航组织规定的全球通用紧急代码。除此以外,像非法干扰-7500/通讯系统故障-7600和目视飞行规则-1200等也是全球通用的紧急代码。以上这些标准代码是航空安全体系中的重要工具,能快速传递紧急信息,确保机组和乘客安全得到最大保障。
二、ADS-B
1、含义
ADS-B的具体含义解释如下:
A-Automatic: 系统自动工作,无需信号发射方【飞机/飞行员】或信号接收方【以空管管制员为主,和其他接收方】;
D-Dependent: 依赖飞机系统提供,可按需通过卫星传输的数据/信息;
S-Surveillance: 使用于识别飞机飞机多系统提供的运行参数的信息实施监视功能;
B-Broadcast: 飞机多系统提供的信息持续不断地以广播的方式,通过飞机/发射器,向包括卫星在内的,其他有接收功能/能力的飞机和/或其他任何有接收能力的接收站/接收设备发送。
2、工作过程
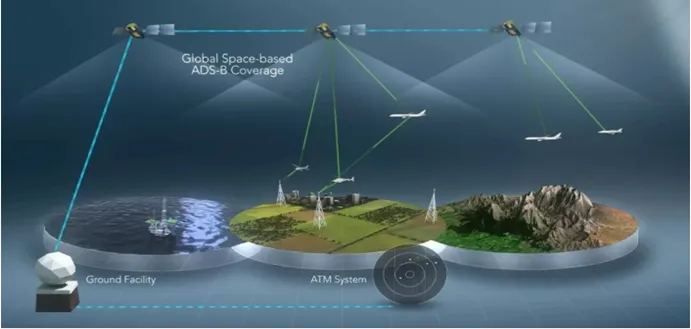
ADS-B 工作和二次雷达相似,给包括卫星,其他有接收功能/能力的飞机和其他任何有接收能力的接收站/接收设备提供飞机的定位信息。雷达系统监视飞机定位首先需要雷达向监视的目标【主要指飞机】发送讯问信号,被监视目标在通过装机的应答机回复雷达的讯问,回复设定的讯问信息。和雷达监视目标的工作原理相比,ADS-B不依赖雷达的讯问信号就主动以广播的方式自动发送系统设定的信息。
ADS-B 自动发送的信息都来自飞机的系统,这其中最重要的信息就是来自飞机全球导航卫星系统/全球定位系统【GNSS-Global Navigation Satellite System/GPS–Global Positioning System】的定位信息,然后再用装机的发射器【squitter】以1090兆赫的频率【国际民航组织推荐,中国使用的方式】发送出去。
二次雷达监视飞机定位本身使用的就是1090兆赫频率,这也是ADS-B的工作,这使ADS-B系统工作和已广泛使用的雷达监视系统的融合更容易。
当前运行机队的主力机型都装备有具备S-模式的应答机,S-模式应答机本身就自带发射器,但发射器的主要作用是为避让和防撞系统【TCAS-Traffic Avoidance and Collision System】使用,探测和联络临近的其他飞机。
ADS-B功能使用的是能够传输更大数据量的1090兆赫扩展式发射器【1090Mhz Extended Squitter],它能提供更多飞机的定位信息。ADS-B 发送的信息由地面接收设施/地面接收天线接收后再转发给数据使用方【主要是空管管制员】。
最近几年交付飞机就已经将ADS-B的功能整合到了应答机上,只要应答机接通工作,ADS-B就自动开始广播发送设定的信息。关闭应答机(应答机断电)后ADS-B也自动停止工作。当前正在运行,但还没有ADS-B功能的飞机要增加ADS-B功能可通过贯彻执行飞机制造厂家服务通告,单独购买第三方STC,或采用其他局方可接受的方式改装升级。
3、主要部件
大气数据惯性基准系统(ADIRS)-提供气压高度,气压压力设定值,升降率和航向;
全球定位系统(GPS)-提供定位,速度和几何高度;
ATC 控制面板(ATC Control Panel)-提供应答机工作模式和身份识别;
飞行控制组件或模式控制面板MCP(FCU or MCP)-提供机组选择的高度;
防撞计算机(TCAS Computer)-提供避让防撞计算机和无线电高度;
飞行管理引导计算机(FMGC)-提供飞机识别号,主要就是航班号。
4、ADS-B技术历史沿革和技术应用方式
概念始于上世纪70年代,但直到90年代后期才开始真正的测试和推广应用。上世纪90年代后期,FAA启动了一个旨在演示ADS-B在现实运行环境下的能力,被称为是21世纪安全飞行【Safe Flight 21 Program】的项目,1998年FAA和欧洲航行安全组织【Eurocontrol】合作,进行了更深度的测试和功能开发。
2003年国际民航组织第10次导航会议将ADS-B【广播式自动相关监视】技术应用指定为监视飞机的一种方式,澳大利亚是第一个执行ADS-B【广播式自动相关监视】技术应用的国家,并从2012年开始强制执行,几年后其他国家才开始跟随执行。 包括美国在内的许多国家都从2020年才开始强制执行。
为保障运行安全和提高运行效率,2021年底以前,中国的所有航路,终端区和机场都将具备ADS-B运行能力。到目前为止,全世界绝大多数国家都把ADS-B【广播式自动相关监视】技术应用作为强制性要求,禁止不具备ADS-B能力的飞机进入这些国家的领空。
5、技术应用方式
根据ADS-B信息传递的方向,ADS-B技术应用又划分为ADS-B发送【ADS-B OUT】和ADS-B接收【ADS-B IN】两类。具备发送功能就像是安装了扩音喇叭的飞机,不停地报告/广播自己的定位等信息;而具备接收【ADS-B IN】功能的就可以被认为是长了耳朵的飞机或其他设备,随时接收具备发送功能的飞机和/或其他移动目标广播的信息。
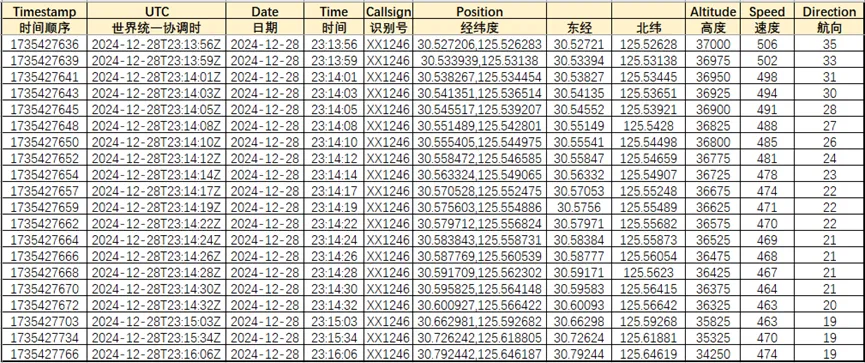
ADS-B发送【ADS-B OUT】指飞机的ADS-B发射机以一定的周期【按规范要求应该是每秒一次】向包括管制员在内的其他接收方发送飞机的定位信息和其它附加信息。发送的典型信息包括但不限于,飞机识别信息,时间,定位【经纬度】,高度,速度,航向和爬升率等。ADS-B发送【ADS-B OUT】是机载ADS-B设备的基本功能,地面站通过接收飞机发送的信息,监视空中交通状况信息,起到类似于二次雷达监视功能。
6、信息内容
7、其他功能
除了ADS-B发送功能外,ADS-B还有一个接收【ADS-B IN】功能。具备接收功能的飞机,其他移动动设备和相应的地面接收站等。飞机上典型的应用就是机组使用的,能看到其他飞机或地面车辆/移动设备(如果装备了ADS-B发送功能)的运行状况,被称为驾驶舱交通信息显示器【CDTI】。ADS-B 的接收功能可为飞行员提供临近交通状况,提高机组情景/周边环境意识【特别是在恶劣环境下的周边环境意识】,以便能及时避让可能影响安全运行的移动物,提高运行效率。
具备初级功能的ADS-B机载显示只提供临近,有ADS-B发射功能的移动设备【像地面勤务保障车辆等】的相对位置和速度;而具备高级功能的设备可为飞行员提供比如飞行曲线,早期报警等信息和目标识别辅助功能。如果飞机所在的机场所有临近飞机或地面移动车辆/设备都装备有ADS-B发射功能,CDTI/或手持平板可以作为一种全方位/多功能的预警工具。
三、ADS-B和传统雷达监视对比分析
1、监视方式
ADS-B监视方式
ADS-B地面站建设成本是传统二次雷达的九分之一左右,精度可以提高几个量级,监视数据更新速度更快【能达到1秒2次】。在无雷达覆盖区域,ADS-B可作为唯一的机载监视数据源,不仅可对空中移动目标的监视,从运行层面,还可减小飞机间隔标准,优化航路设置和提高空域容利用率。
雷达监视方式
要实现以上同样的目的,雷达波的信号会受到障碍物的影响如下:
反射影响:当二次雷达询问信号或应答信号遇到山峰,高大建筑物等固定障碍物时可能会导致:1)假目标显示 – 反射回来的信号可能会被雷达接收并处理后造成距离和方位都不正确的假目标显示;2)解码错误 -使信号的输路径和时间发生变化,从而引发解码错误,影响目标信息的准确获取;3)垂直波束分裂 – 垂直方向障碍物的反射可能会使雷达波束分裂成多个波束,导致雷达对目标的高度测量出现误差;4)旁瓣穿透 – 障碍物的位置和形状可能会使雷达波束的旁瓣接收到反射信号,从而使雷达探测到原本不应该探测到的目标/或使目标的回波信号强度发生异常变化,影响雷达的探测性能;5)幻影飞机 – 某些情况下障碍物反射可能会形成类似飞机目标的回波信号,产生幻影飞机的现象。
遮挡影响:如果大型障碍物如山脉和高楼大厦位于雷达与目标飞机之间,直接阻挡雷达波的传播路径,导致雷达无法探测到探测盲区内的目标飞机,低空飞或复杂地形附近飞行的飞机可能会使雷达的监控范围出现较大的缺失。
2、投资和后期维修成本
ADS-B监视方式
ADS-B数据更新速度快,数据精度高,按规范应该至少一秒发射一次,可以比二次雷达以更快的速度获取飞机定位和速度等信息。除了数据更新速度快,数据精度高以外,ADS-B还可以广播飞目标机的其他如航班号,飞机类型,高度,爬升率航向等相关信息, 有助于管制员更全面地了解飞机的状态并做出更准确的决策。
使用卫星中继传输信号时,基本上可以全球覆盖【取决是否签署或购买卫星传输服务】。
ADS-B监视方式:ADS-B的地面设施建设成本相对较低,其接收机价格低廉,地面站选址和建设成本是传统二次雷达的九分之一左右;
机载设备成本:机载设备本身就集成了ADS-B的功能或通过简单的一次性改装升级就能实现,改装价格合理。
日常维修成本:无论ADS-B功能是集成到其他机载设备还是独立的STC设备,基本上没有单独/或独立的维修要求,维修和检查工作起来相对简单,成本低廉。
传统雷达监视方式
二次雷达数据更新速度相对较慢【2~4秒一次左右】,可能导致在一些对实时性要求较高的场景无法及时获取最新的飞机信息。二次雷达获取飞机信息相对较少,通常只包括位置,距离,方位等信息,基本满足空中交通管制的需求。
二次雷达系统建设成本高昂,涉及到大型天线,发射机,接收机,信号处理设备和其他众多复杂且精密的部件。机载设备成本要求机载设备必须要有应答机功能。虽然应答机技术已相对成熟,但价格昂贵并且随着新型应答机的技术改进和垄断等原因,价格随时上涨。
另外,二次雷达系统本身具备体积大,部件多,结构精密,对维修人员的专业技术水平要求较高的特征,维修工作复杂和维护成本也较高。
综合分析对比发现,ADS-B在投入/投资成本上具有明显优势,尤其是地面设施建设和机载设备成本较低,同时在数据更新速度和信息丰富度方面表现出色;而二次雷达监视除前期/一次性的巨大投入/投资以外,后续维修和维护成本都很高,获取数据量不及ADS-B,数据和信息准确度和及时性和抗干扰性等都有所欠缺。
自有案例加网络公众号
一、背景
自2024年以来,惯导模式选择面板旋钮脱落的案例呈现增多的趋势。
| 年份 | 旋钮脱落事件数量 |
|---|---|
| 2019 | 1 |
| 2023 | 1 |
| 2024 | 3 |
| 2025(2月初) | 2 |
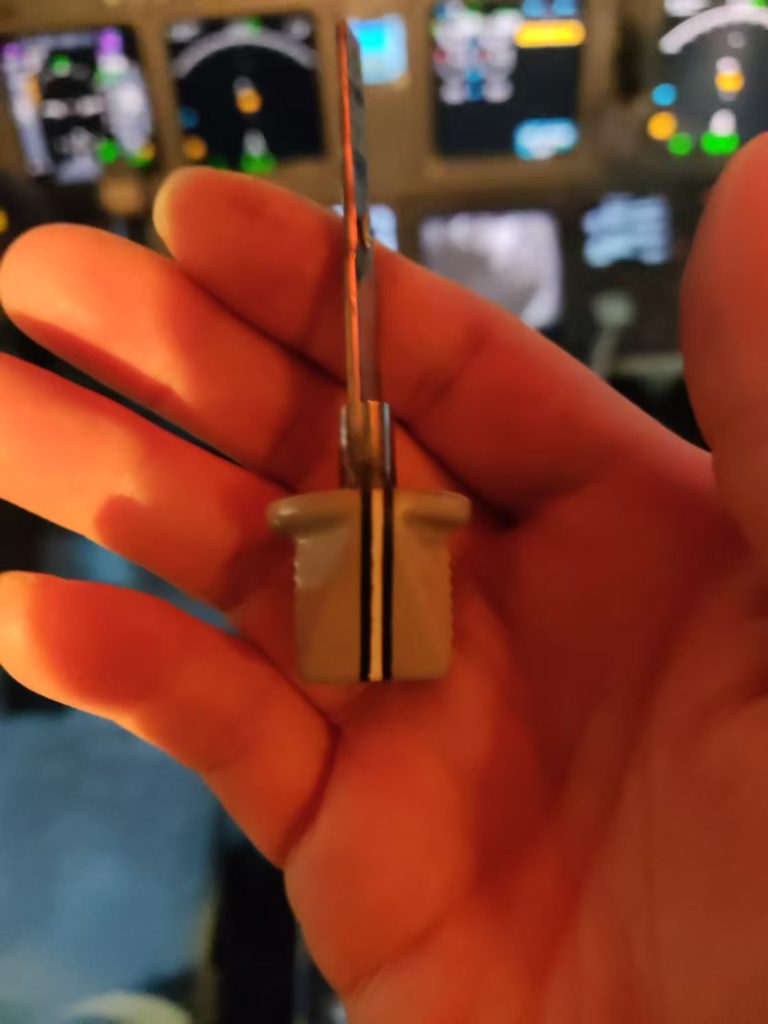
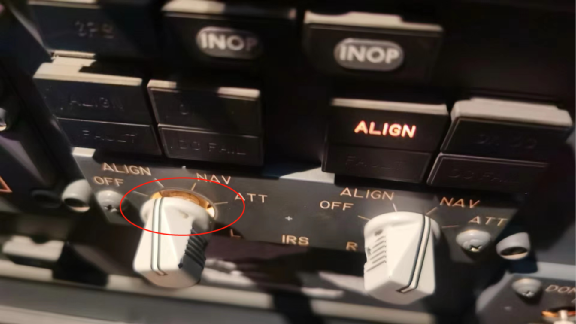
典型的表现图片如下所示。


二、基本原理
1、模式选择组件(MSU)将 IR 选择模式传送到 ADIRU,它还提供 ADIRS操作和故障指示。MSU 有两台模式选择器,一个用于左 ADIRU, 一个用于右 ADIRU。
2、每个状态选择器有四个位置:
· OFF位:ADIRU 不可操作
· ALIGN 校准位:使 ADIRU 起动校准程序
· NAV 导航位:ADIRU 在成功校准后进入导航模式
· ATT 姿态位:ADIRU 进入姿态模式。
3、面板有以下指示灯
· ALIGN :在 ADIRU 校准期间一个白色信号灯持续发亮,当 ADIRU 需要信息时, 信号器会闪亮。
· ON DC:接通直流,当 ADIRU 在 28 伏直流电电源上时琥珀色信号灯持续发亮。
· FAULT:故障,当 ADIRU 的 IR 功能失效时琥珀色信号灯持续发亮。
· DC FAIL:直流故障,当直流电电源低于 18 伏直流电时琥珀色信号灯持续发亮。
4、需要注意的是,模式选择器具有降低飞行机组意外将 ADIRU 正在运行模式意外中止的这一特征。
1)、选择器设置在 NAV 位置时, 操作员必须拉起旋钮, 将它放在 ATT 模式上。
2)、选择器设置在 ALIGN 位置时, 操作者必须拉起旋钮将选择器放在 OFF 位置。
3)、所有其它位置改变不需要操作者拉动旋钮。
因此: 有些电门必须先拉出, 然后再转动。如拉出它们之前试图转动这些开关, 会损坏开关。
三、旋钮脱落问题
从上文可以得知当从NAV位置到ATT位置,或者从ALIGN到OFF位置,需要拉出旋钮再转动,防止工作中的惯导意外停止。也就是说连杆一旦松脱后,就没有了这个功能,同时在实际工作中还发现连杆掉出后是无法再次插到底部、无法校准惯导、航线是无法修复的,需要更换面板。
当一侧导航面板故障后,另一侧功能正常的情况下,可以参考MEL34-35 惯性基准系统(IRS)失效放行。但是规定:执行 CAT II、 RNP/RNAV 运行时,两部 ADIRU 都必须有效。只限于白天目视气象条件(VMC)下飞行,光是这一条就不满足签派放行了,基本上没有放行成功的案例。
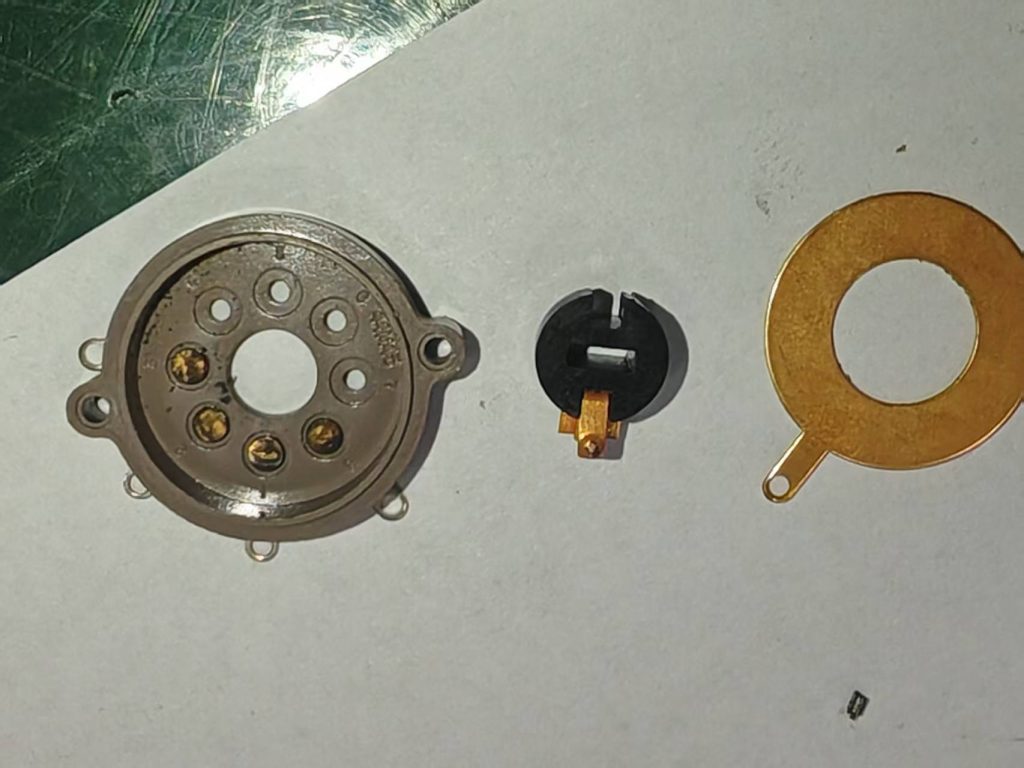
进一步看,实际上旋钮是没有问题,主要出问题的里面的电门,件号44HY24962(下图70)。
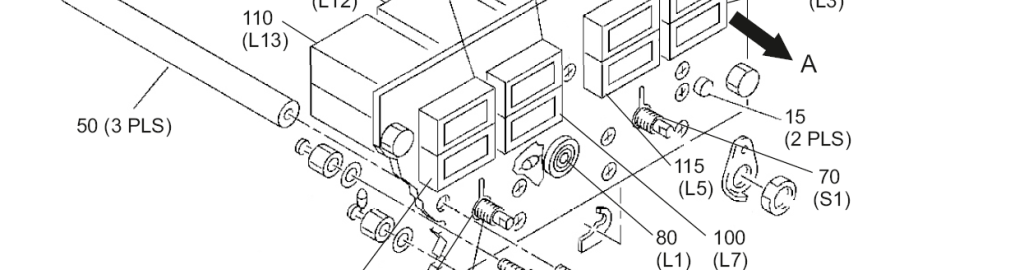
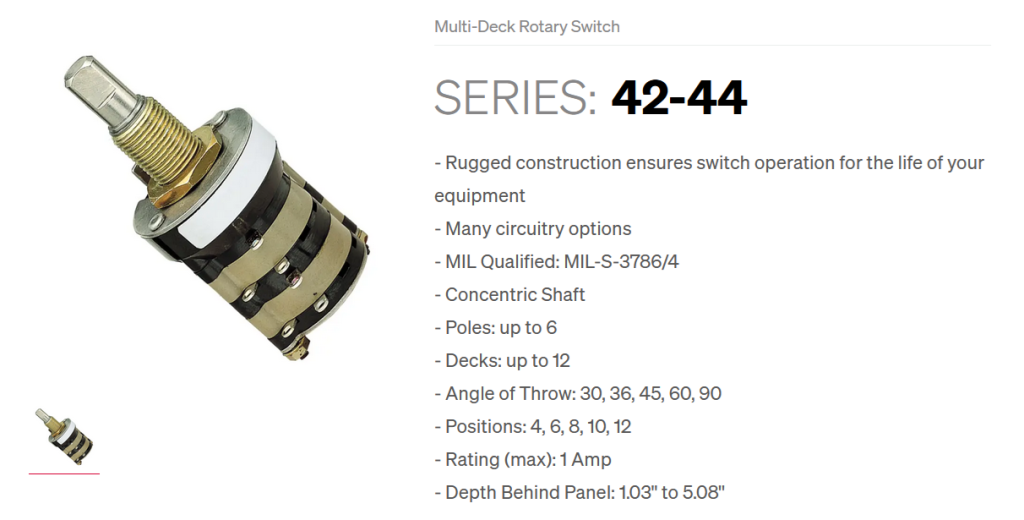
44HY24962是一个由 Grayhill Inc. (GRAYHILL INC,561 W HILLGROVE AVE,LA GRANGE, IL 60525-5914)制造的多层旋转开关(Multi-deck Rotary Switch),额定电流为 1 安培。

在修理中通常对此类故障的处置方式是:

分解照片
1、起到固定拨杆作用的是一个销子。


2、起到档位限制和需提起才能转换的是如下机构组合。


3、4个档位电门是靠内部转块来实现的。