SR 3-5430967702
2022年9月,近期有两架飞机均发生在启封后首段飞行发生前缘监控报文,L.E. PROX SNSR FAULT CODES。进一步统计历史还发生过相同报文,相关读取的FSEU信息如下:
27-81216 F1 PROX RETRACT
27-81218 F2 PROX RETRACT
27-81220 F3 PROX RETRACT
27-81217 F1 PROX EXTEND
27-81222 F4 PROX RETRACT
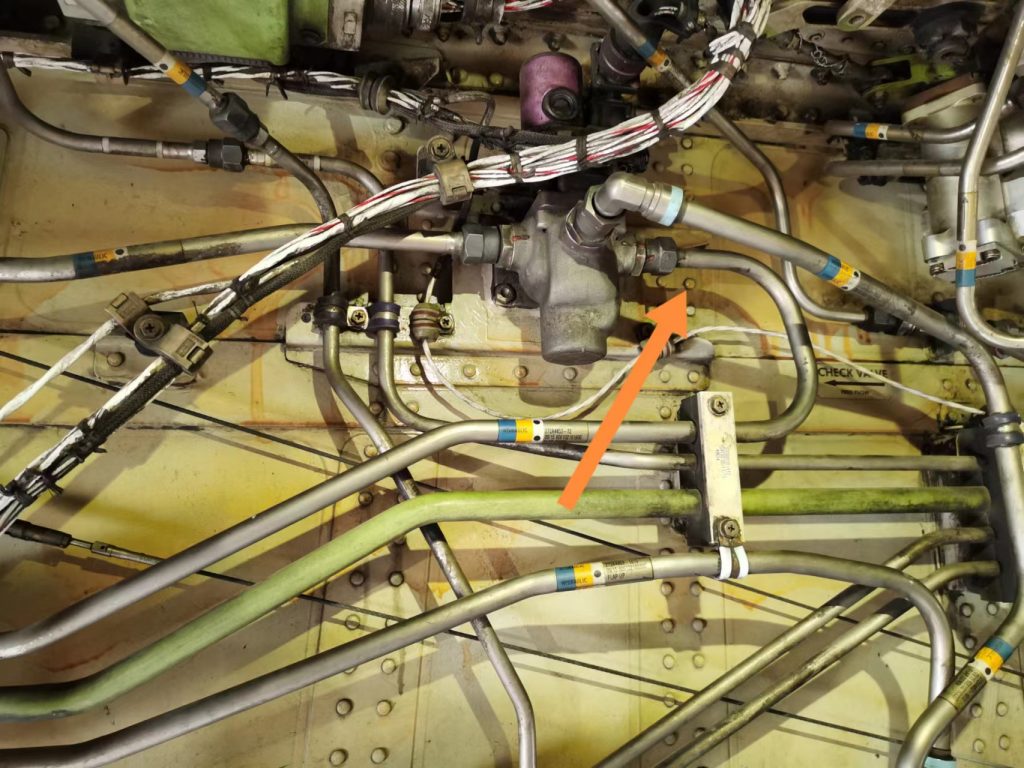
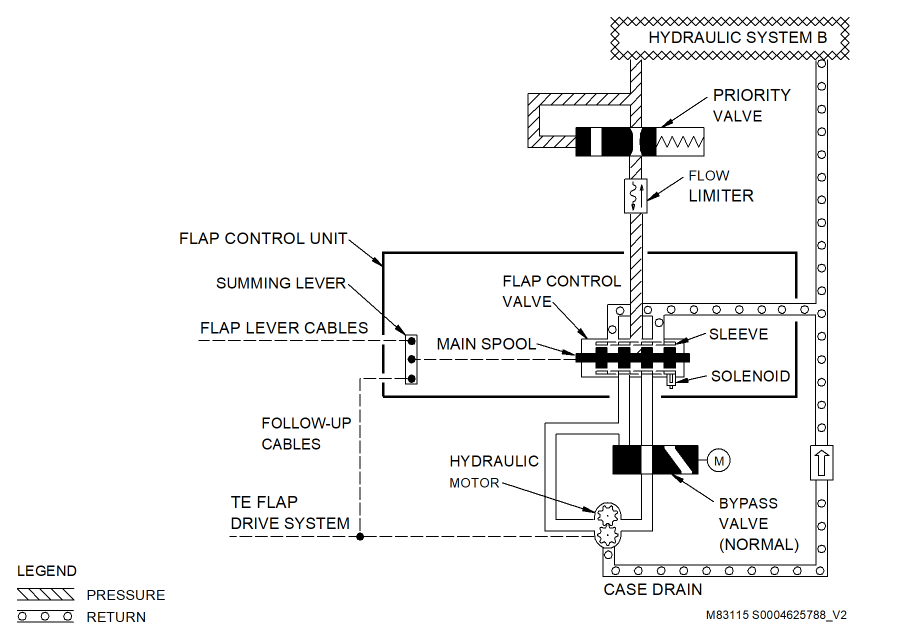
波音表示在飞机停场后收到了类似的报告,原因是在液压系统开启前,飞机通电期间记录了FSEU前缘故障。在这些情况下,故障不是ACTIVE故障,可以在液压系统B加压后清除。波音认为前缘襟翼下垂,故障是内部泄漏的迹象。在没有液压的情况下,前缘襟翼可能会因泄漏而下垂。波音公司建议发生报文后,验证这些故障是否在飞机停放期间记录,并在液压系统应用后清除。如果是,可以将这些报文视为假报文。
R2. The FSEU fault messages will be set following aircraft power up when a slat state mis-compares with the flap lever and other sensor states
R3. Yes, a FSEU fault message found in the attached list will set the LE PROX SNSR FAULT WD 1 or 2 even if the fault clears following hydraulics turn on.