自动驾驶仪的基本功能,简单的来说就是给定一个期望值那么这个期望值可以是驾驶盘输入也可以是MCP输入,自动驾驶通过选择MCP面板上水平和垂直方式按钮,控制空间上水平和垂直方向的飞行状态,进而实现飞机由A点到B点的全过程。
CWS和CMD都同为自动驾驶的两种模式。
CMD模式是直接通过MCP的输入指令,发送到FCC,FCC对从传感器获得的离散输入进行计算,与MCP的输入进行比较,然后通过FCC进行输出,作动AP作动筒,产生力矩执行操作指令,并反馈FCC和驾驶杆,并且驾驶杆会随动,形成舵回路。
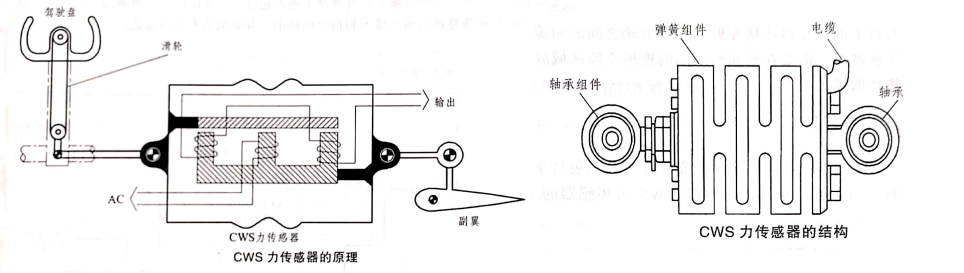
而CWS是通过驾驶杆输出,力传输器感觉操作力的大小和行程,输入到FCC,FCC将传感器的数据和感觉输出组件输出信号做比较,计算出操作指令,输入到AP作动筒,产生力矩进行输出,控制舵面转动,而舵面也将反馈信号反馈到FCC,同时反馈到驾驶杆,驾驶杆随动,也形成舵回路。
同样是自动驾驶的操作方式,CWS模式相当于半自动模式,而CMD模式相当于全自动模式。而当在CMD模式时,通过推动驾驶杆,如果操作力大于21磅,那么会进入CWS PITCH模式,而转动驾驶盘力超过10磅,会进入CWS ROLL模式,同时PFD显示CWS P或者CWS R。而自动驾驶CWS和人工驾驶的区别是CWS不直接操作舵面,而人工驾驶通过钢索传动舵面,同时只需要3磅力。