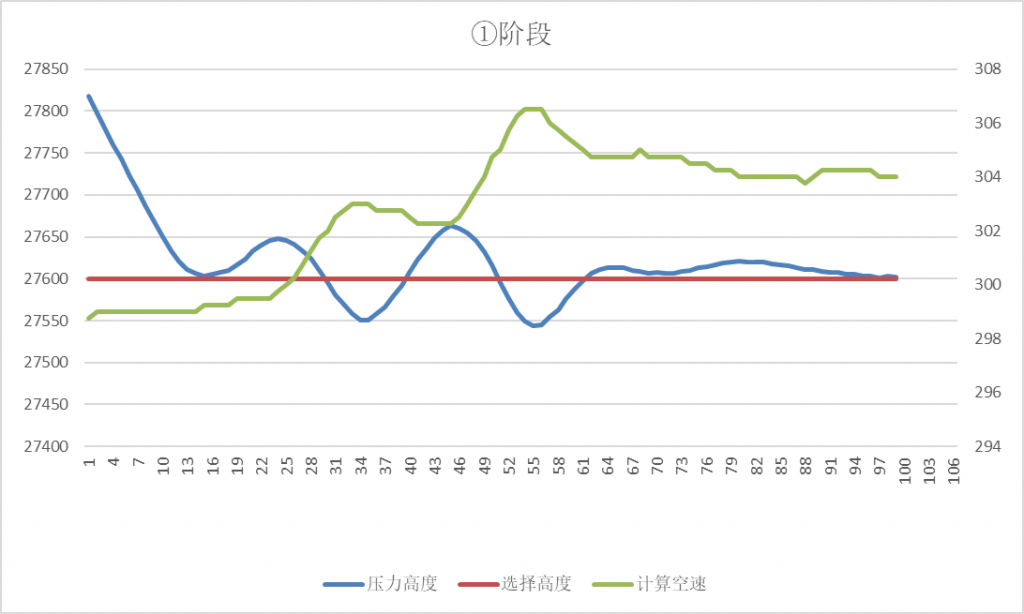
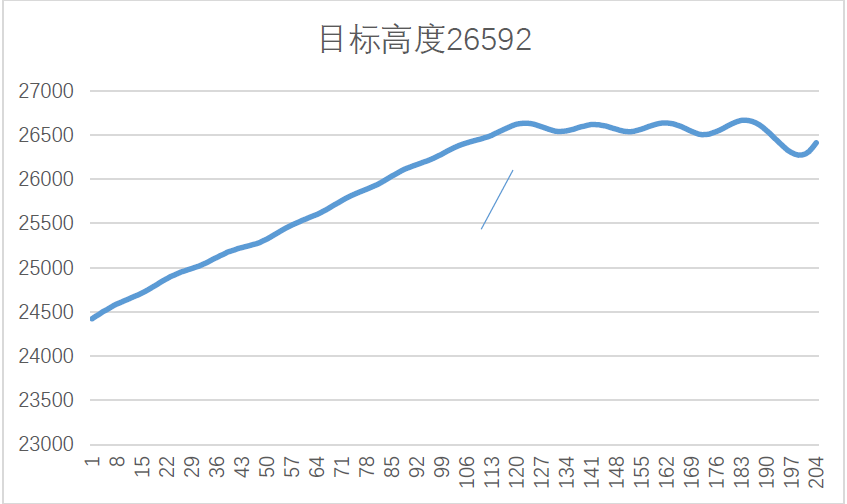
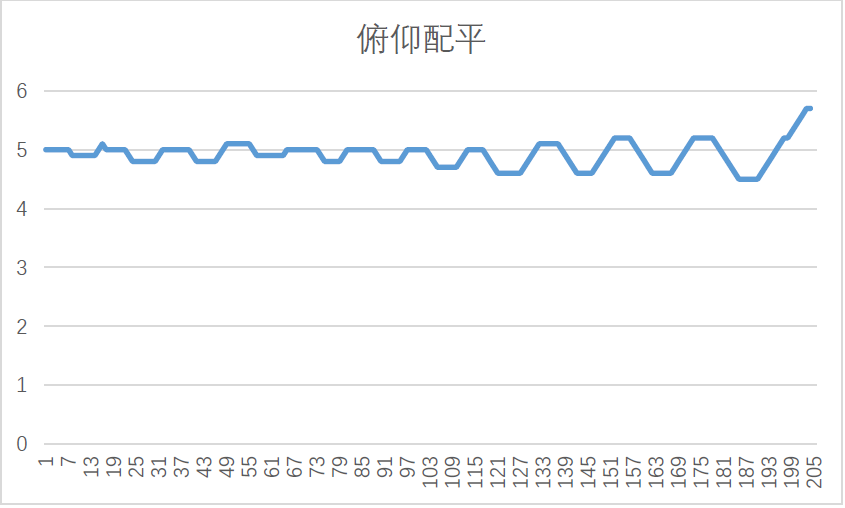
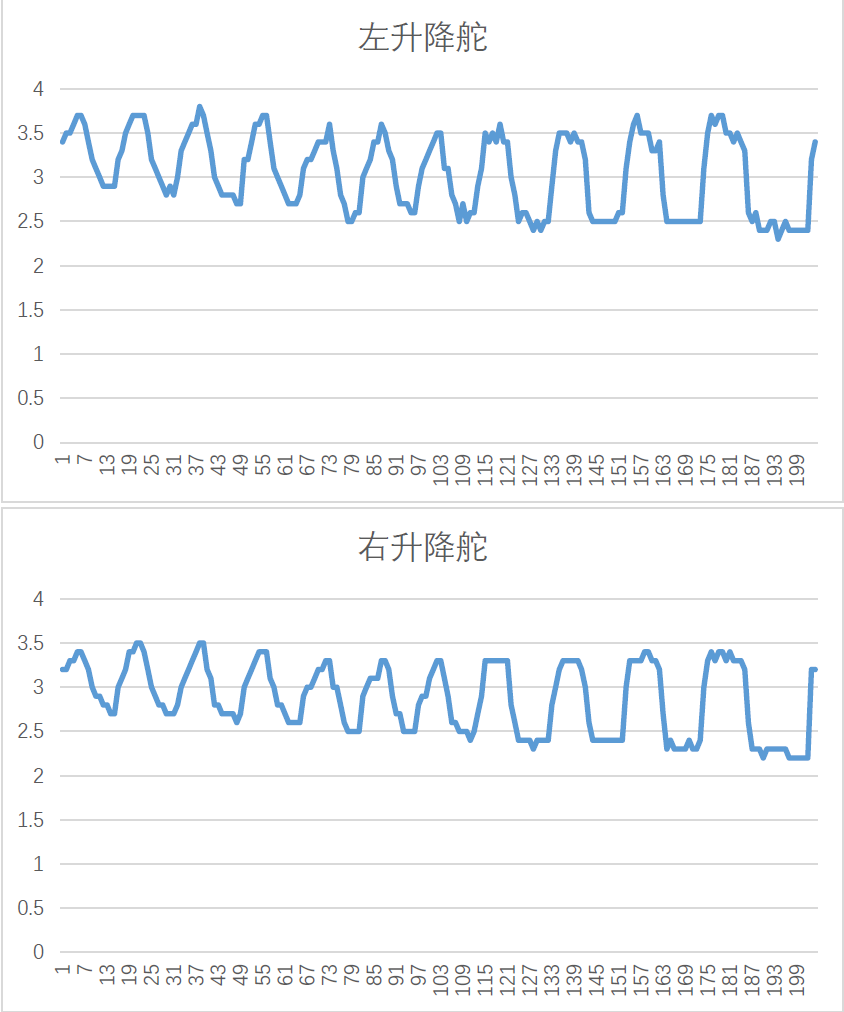
机队中曾有多架机龄在18年以上的飞机反映,达到巡航高度的时候,高度无法保持,反复出现波动的情况。常见的数据表现如下,变现在围绕高度反复变动,其中升降舵也规律性的反复作动:
案例一
案例二
通常的排故过程是先围绕自动驾驶控制和相关自动驾驶作动器,但最后实际上都未能有效解决故障,最终的检查发现看,基本上都是由于升降舵机构磨损导致的。
一,基本原理
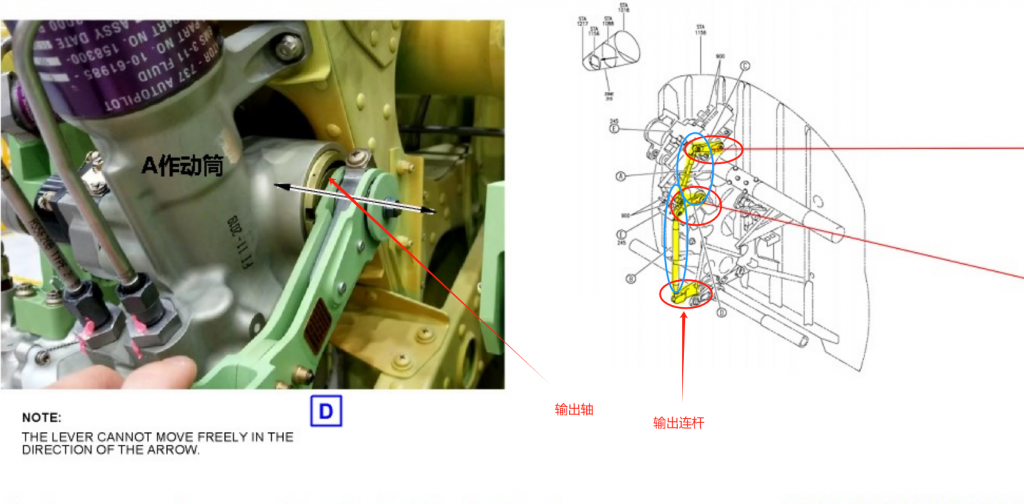
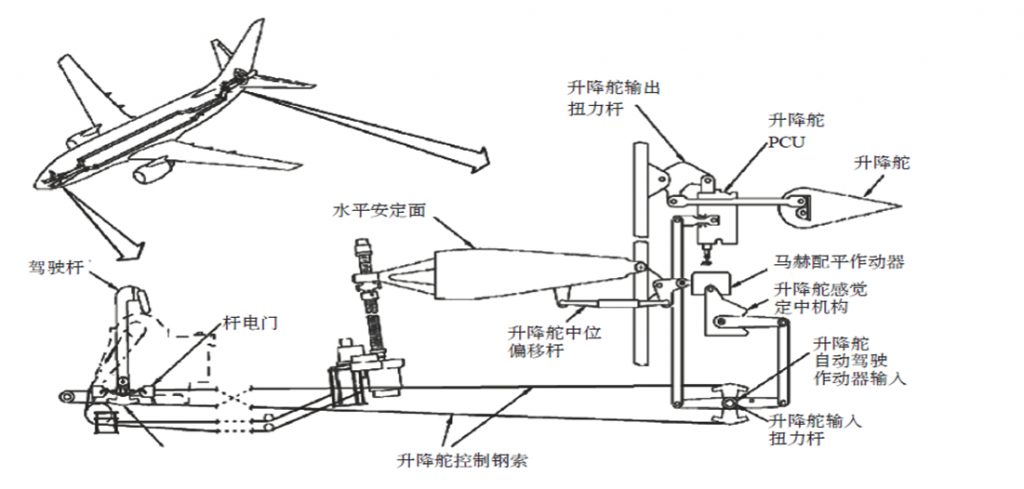
自动驾驶通过水平通道和垂直通道,实现对飞机的姿态控制,进而实现轨迹控制。水平通道的控制主要集中在副翼,而垂直通道则涉及升降舵控制、安定面配平以及升降舵与安定面的相对位置控制,即中位偏移。另外,自动驾驶的核心控制计算机(FCC)还兼具速度配平和马赫配平的功能,其功能实现又与自动驾驶的垂直通道控制(俯仰控制)紧密结合。因而垂直剖面的控制和部件都比水平剖面复杂。垂直通道的相关部件如图1所示。从图1可知,舵面包括升降舵和安定面;动力元件包括升降舵(PCU)、升降舵自动驾驶作动器、安定面主电配平马达、马赫配平作动器、驾驶杆输入;传感器包括升降舵位置传感器、升降舵自动驾驶作动器(LVDT)、安定面位置传感器、中位偏移位置传感器、马赫配平作动器位置传感器、CWS力传感器;通道相关部件包括杆电门组件、配平极限电门、输入输出扭力杆、钢索及其部件。随着飞行小时的增加,控制系统的硬件因磨损和老化出现性能衰退,多个部件控制精度降低,控制误差增加,老龄飞机自动驾驶垂直剖面的故障也就同期增加。但这类故障并非是单个部件的失效所导致,故障现象多样化,排除也非常困难,通常都会引发重复故障和疑难故障。
二、常见表象
A.自动驾驶衔接
B.A或B通道均可能导致震荡
C.震荡周期小于25秒
D.使用VNAV、高度层改变进行上升和下降时会出现此现象
E.上升或下降均有可能
三、可能性原因
输入问题:ADIRU、FMC或MCP。
舵回路:FCC、俯仰自动驾驶作动器、传感器、安定面配平(马达、M1201等)、马赫配平。
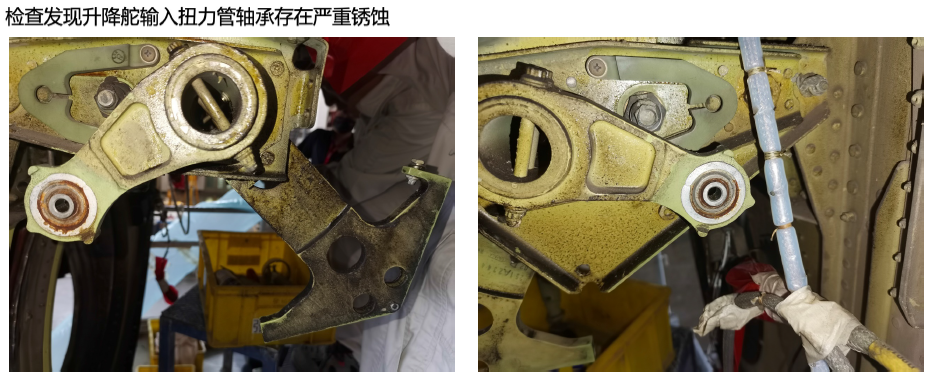
机械传动机构:扭力管轴承、衬套、间隙或定中组件。
四、检查结果
通常都会发现多个部件的锈蚀、偏磨等异常。

五、波音说明
根据波音Service Information Letter (SIL) 737-SL-27-203 rev: B文件:
波音对一些事件航班的飞行数据分析表明,俯仰振荡在幅度上逐渐增大。在爬升过程中出现俯仰振荡,周期约为15至25秒。结合摩擦和间隙的限制自动驾驶仪器的权力,使振动幅度增长直到自动脱离。请参阅图附上的自动驾驶仪执行器的一个例子是“削波”在音调振荡。波音公司能够协助解决这个问题。即便这个问题只出现在某些自动驾驶模式,根本原因被认为是电气控制系统相结合的间隙和摩擦。航司进行电气系统相关测试从737-sl-27-203-b发现电气的感觉和定中心机构有一个非常规量数值和扭矩管轴承存在严重腐蚀。更换感觉和定心机构和扭矩管轴承后,飞机不再表现出发散的俯仰振动。另一家航司报告了类似的情况,发现同样的扭矩管轴承损坏。表现出这种情况的飞机累计飞行时间超过40000小时。
2023年12月11日案例更新
有航司反映,机组反映平飞过程中,风速风向稳定情况下,安定面配平自动往前往后持续打3圈(持续3到5分钟)。DFCS系统自检无故障代码,安定面电配平系统测试正常,译码结果正常。以及4边进近时,空速180节左右,高度3000FT,风速和风向很稳定,自动配平向前配平、向后配平来回转动3圈,持续时间3-5分钟,OUT OF TRIM灯没亮,A/P工作正常。后检查发现自动驾驶作动筒连杆松动。