原理
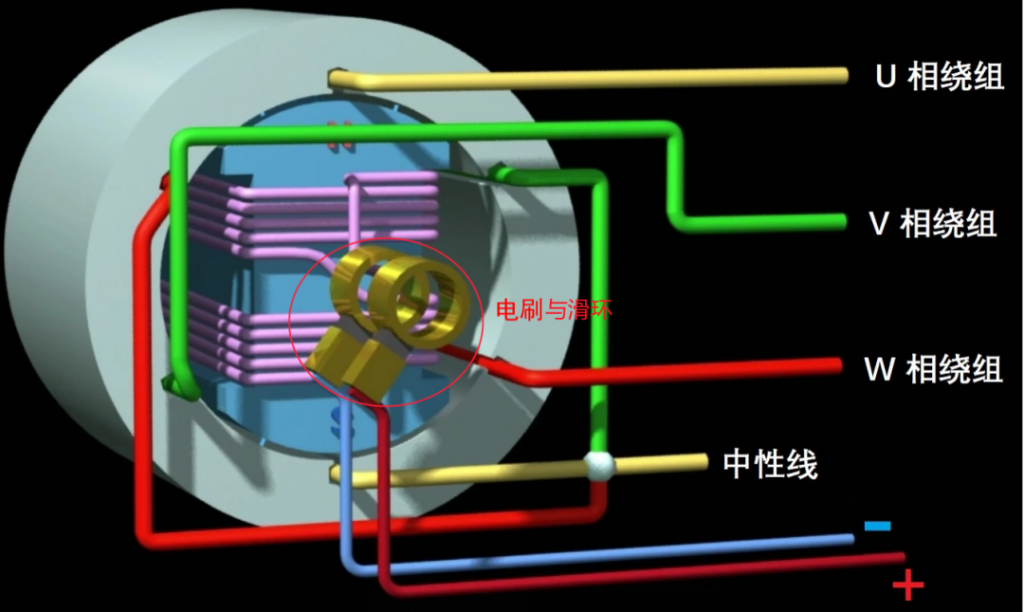
从原理来看,如下图, 旋变是一个能够转动的变压器,在转子绕组(1侧)上加上交流电压后,定子绕组(2侧)中由于交链磁通的变化产生感应电压,感应电压与励磁电压相关的耦合程度随转子转角而改变。通过测量输出电压及周期,再经过换算就可以知道转子转角及转速的大小。
种类
按有无电刷和滑环,可将旋变分为接触式旋变和无接触式旋变两种。
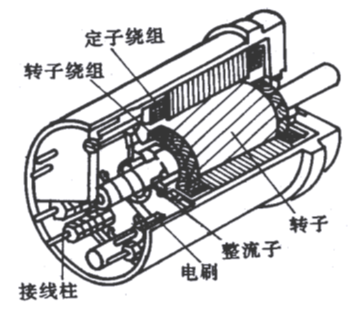
其中接触式旋变,就是依靠电刷和滑环将信号输出绕组与外电路进行连接;
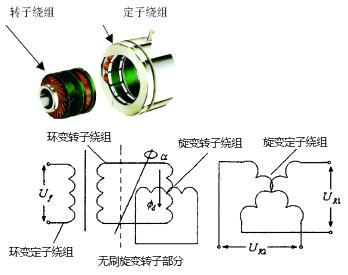
无接触式旋变中,从结构上可进一步细分为环型耦合旋变和磁阻式旋变。
环型耦合旋变是靠环形耦合来取代电刷和滑环的。它分为两大部分,即旋变本体和附加变压器。旋变本体的转子绕组与附加变压器原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器副边线圈间接地送出去。
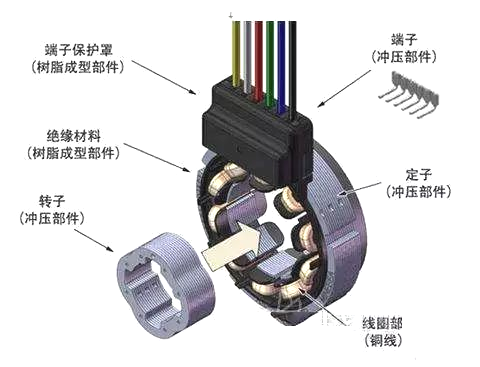
磁阻式旋变是使用永磁材料,且形状做特殊设计,来取代转子励磁绕组及其电源作为激励,进而省去转子与外电路相连接用的电刷和滑环机构。磁阻式旋变的励磁绕组和输出绕组放在同一套定子槽内,固定不动。
应用
按旋变的输出电压和转子转角间的函数关系,旋变可分为正余弦旋变、线性旋变以及比例式旋变。不管通过何种旋变,最终测得的输出电压,都需要经过信号放大、数模转换及标定换算过程,从而获得测量值。
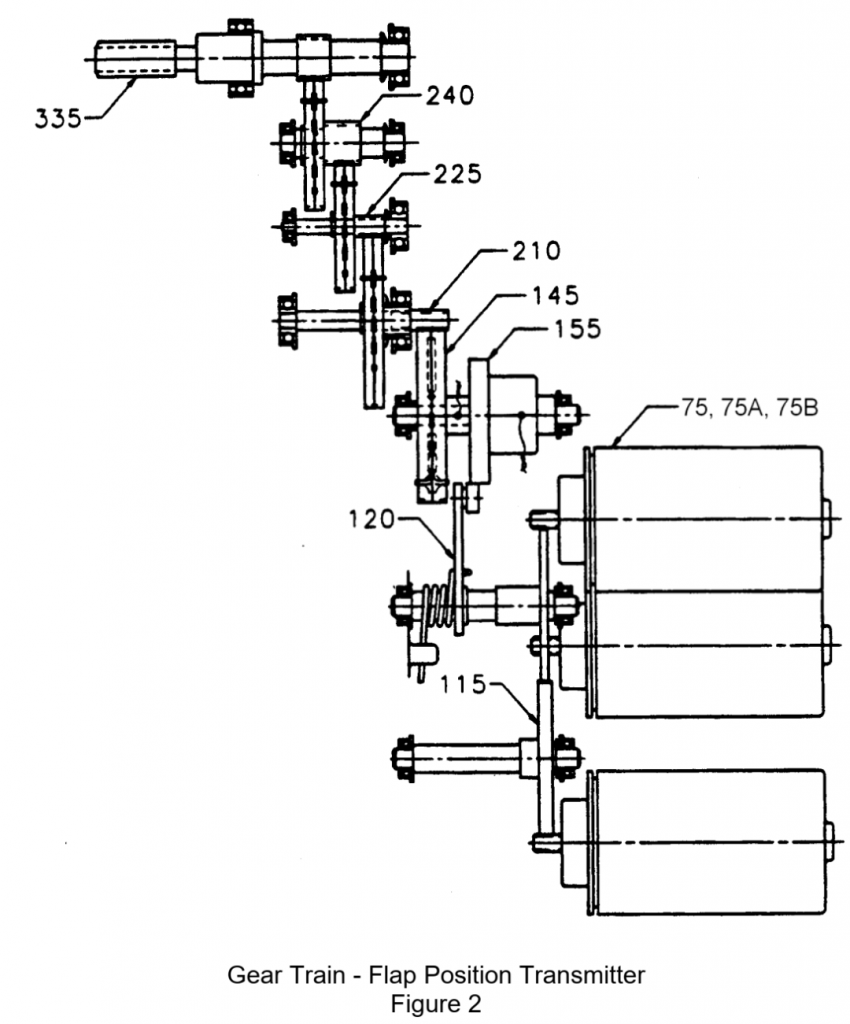
以737NG襟翼位置传感器为例,2个襟翼位置传感器(1号和8号传动机构外侧)由法兰盘固定,并由输入轴经四级减速齿轮降速后驱动其内部的3个同步器(襟翼位置同步器、失速警告同步器和自动驾驶同步器),如下图。
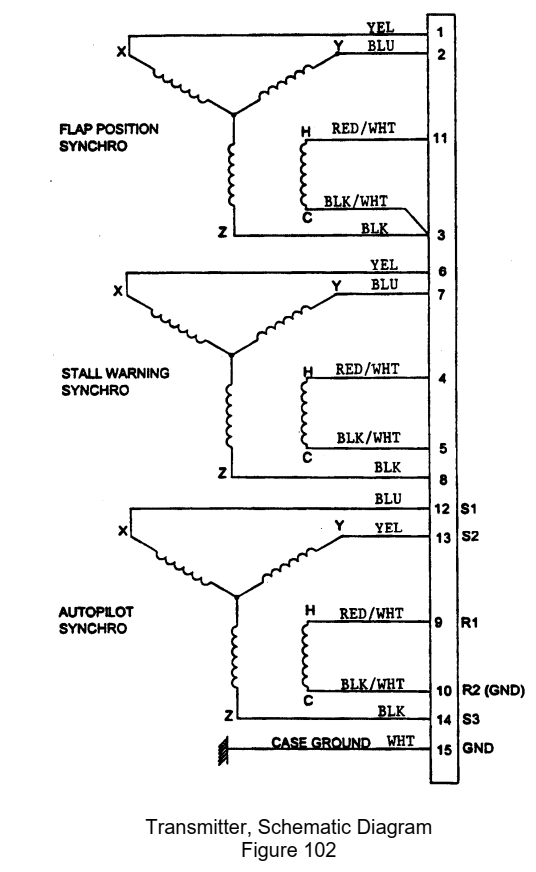
襟翼位置同步器的3-11绕组是转子(输入),1-2-3三相对称的电枢绕组是定子(输出),如下图。
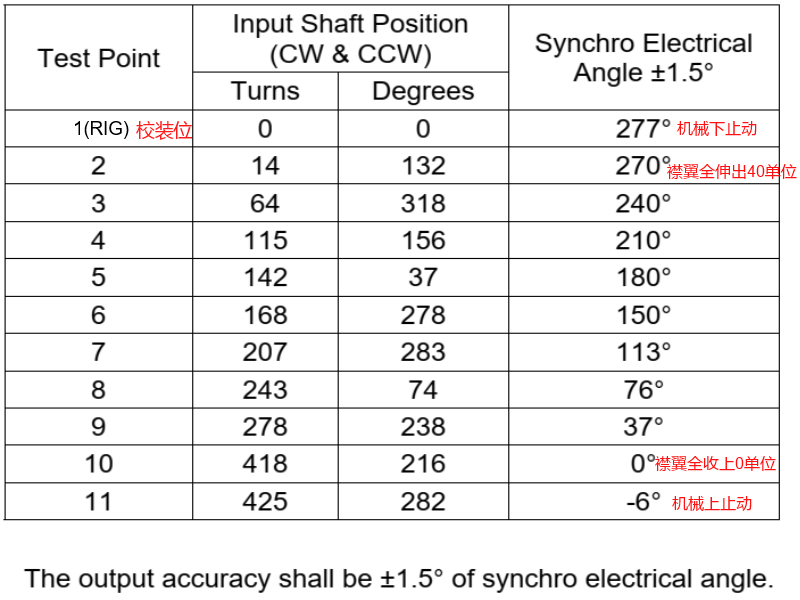
如上图所示,转子绕组为一对磁极,其电角度和机械转角相等。当转子绕组输入28VAC时,产生周期变化的励磁磁场,输入轴(转动角度范围为校装位或机械下止动点0度到425转282度)经四级减速后驱动转子旋转(电角度或机械转角的转动角度范围为校装位277度到-6度),如下图,励磁磁场就顺次切割定子各相绕组,定子被动产生感应电信号,由FSEU等组件进行检测。后缘襟翼位置指示系统实际工作中,同步器电角为0度时,标定为后缘襟翼全收上(0单位);同步器电角为270度时,标定为后缘襟翼全伸出(40单位)。
原理上,旋转的绕组3-11与外部线路通电,经电刷实现,如下图,比较简易,但如前所述,电刷和滑环是机械滑动接触的,所以它的可靠性差,寿命也较短。因此,波音737NG-FTD-27-17002阐述了襟翼位置传感器故障产生的原因之一是同步器的电刷和滑环之间产生电弧。电弧是由于机体震动导致电刷瞬时脱离滑环,形成间隙而产生的。电弧会导致电刷腐蚀,增加电刷和滑环之间的摩擦力,最终导致同步器出现卡滞,FSEU将会判断为襟翼指示的故障。